第8章 完整 MATLAB 处理流程
第8章 完整 MATLAB 处理流程
前面几章已经把雷达处理链拆开讲过:第 3 章把多发脉冲的 I/Q 样本排成 rx_matrix,第 4 章在快时间上做距离处理,第 5 章在慢时间上做 Doppler 处理,第 6 章把距离-速度图上的响应筛成检测结果,第 7 章说明方向信息怎样进入目标参数。
本章把这些步骤放到同一个 MATLAB 程序。程序里每个变量都要回答三个问题:它的维度是什么,下一步沿哪一维处理,处理后对应哪个物理量。
本章采用简化 pulse-Doppler 场景:两个点目标,32 发脉冲,基带 LFM 信号。完整脚本在配套 MATLAB 附件,正文只保留主要片段和检查方法。
8.1 仿真条件
本章用两个点目标作为例子。雷达参数延续前面几章的简化设定:使用基带 LFM 脉冲,接收端得到复数 I/Q 样本,多发脉冲按发射顺序组成 rx_matrix。
| 参数 | MATLAB 变量 | 取值 | 含义 |
|---|---|---|---|
| 光速 | c | $3\times10^8\,m/s$ | 距离与时延换算 |
| 载频 | fc | $10\,GHz$ | 决定波长 |
| 波长 | lambda | $0.03\,m$ | Doppler 到速度的换算 |
| LFM 带宽 | B | $10\,MHz$ | 影响距离分辨率 |
| 脉冲宽度 | Tp | $20\,\mu s$ | 发射脉冲持续时间 |
| 采样率 | fs | $20\,MHz$ | 快时间采样间隔 |
| PRF | PRF | $5\,kHz$ | 慢时间采样率 |
| 脉冲数 | Npulse | $32$ | 决定 CPI 和速度分辨率 |
| 快时间采样点数 | Nfast | $2048$ | 决定接收窗口长度 |
两个目标的真值设定如下:
| 目标 | 距离 | 径向速度 | 幅度 |
|---|---|---|---|
| A | $6\,km$ | $+30\,m/s$ | $1.0$ |
| B | $9\,km$ | $-20\,m/s$ | $0.75$ |
这里的速度都落在本例的不模糊速度范围内。因为
所以 $+30\,m/s$ 和 $-20\,m/s$ 都能在双边速度轴上显示出来。若把 PRF 降低到 $2\,kHz$,$v_{\max}$ 会变成 $15\,m/s$,目标 A 就会发生速度模糊。
这里的目标表述有两层。scene 里的距离和速度是真值,用来生成仿真回波;target_list 是处理链从回波中估计出来的结果。真实雷达只有后者,没有前者。
8.2 从回波矩阵到目标表
处理链写成一行数据流:
scene -> tx -> rx_matrix -> range_data -> rd_map -> det_mask -> target_list各变量的作用和维度如下:
| 变量 | 典型维度 | 轴含义 | 物理含义 |
|---|---|---|---|
scene | 结构体 | 不适用 | 目标真值和雷达参数 |
tx | 1 x Nt | 快时间 | 发射基带 LFM 脉冲 |
rx_matrix | Npulse x Nfast | 行:脉冲序号;列:快时间采样点 | 原始复数回波矩阵 |
range_data | Npulse x Nfast | 行:脉冲序号;列:距离相关采样点 | 距离压缩结果 |
rd_map | Ndoppler x Nrange | 行:Doppler / 速度 bin;列:range bin | 距离-速度图 |
det_mask | 与 rd_map 相同 | 行列与 rd_map 对齐 | 检测掩码 |
target_list | Ntarget x 字段数 | 每行一个目标 | 距离、速度、响应强度等估计结果 |
顶层程序组织成下面的形式:
scene = ch08_default_scene();
[tx, mf, k] = ch08_make_lfm_pulse(scene.B, scene.Tp, scene.fs);
rx_matrix = ch08_simulate_echo(scene, k);
[range_data, range_axis] = ch08_range_compress(rx_matrix, mf, scene.c, scene.fs);
[rd_map, rd_power, vel_axis] = ch08_doppler_process(range_data, scene);
[det_mask, row_idx, col_idx] = ch08_detect_targets(rd_power, 0.35);
target_list = ch08_make_target_list(row_idx, col_idx, rd_power, range_axis, vel_axis);这段代码只看函数接口,不看函数内部。第一个输出 rx_matrix 还只是接收样本矩阵;最后的 target_list 才是可以汇报的目标结果。中间每一步都在改变数据的组织方式。
我们再检查尺寸:
size(rx_matrix)
size(range_data)
size(rd_map)
size(det_mask)
height(target_list)如果 rx_matrix 和 range_data 的行列方向已经弄反,后面的 Doppler FFT、速度轴和检测点都会跟着错。
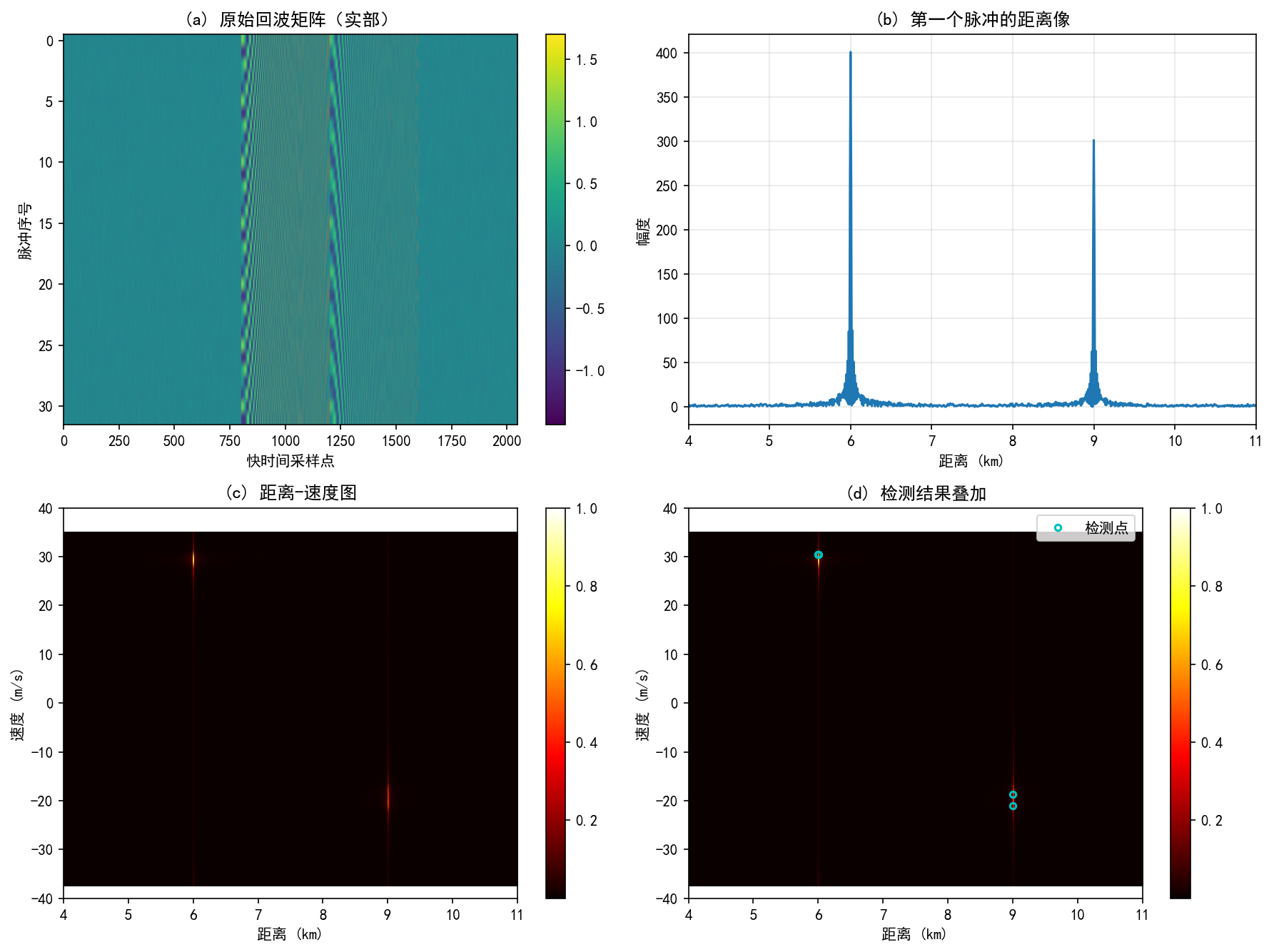
图8.1 展示了完整处理链的四个阶段。从原始回波矩阵开始,经过距离压缩得到单脉冲距离像,再经过 Doppler 处理得到距离-速度图,最后通过阈值检测筛选出目标。
8.3 回波矩阵的生成
场景参数怎样进入回波
scene 里每个目标至少有三个参数:距离 $R_i$、径向速度 $v_i$ 和幅度 $A_i$。距离决定回波晚到多少,速度决定相邻脉冲之间多转多少相位。
距离到时延的关系仍然是第 4 章的公式:
速度到 Doppler 频率的关系仍然是第 5 章的公式:
第 pulse_idx 发脉冲中,目标 $i$ 的慢时间相位写成
其中 $T_r=1/\text{PRF}$。程序里只需要把这两个关系放进回波生成函数:
tau = 2 * R / scene.c;
fd = 2 * v / scene.lambda;
delayed_t = fast_time - tau;
valid = delayed_t >= 0 & delayed_t < scene.Tp;
echo(valid) = amp * exp(1j * pi * k * delayed_t(valid).^2) ...
.* exp(1j * 2*pi * fd * (pulse_idx - 1) * scene.Tr);前半部分 exp(1j*pi*k*delayed_t.^2) 是延迟后的基带 LFM 回波,后半部分是目标运动带来的脉冲间相位变化。第 4 章处理的是前半部分怎样形成距离峰,第 5 章处理的是后半部分怎样形成速度峰。
rx_matrix 的行和列
回波生成函数最终输出 rx_matrix。本章程序采用下面的约定:
rx_matrix: Npulse x Nfast也就是每一行是一发脉冲的快时间采样,每一列是同一个快时间位置在不同脉冲之间的慢时间序列。
| 方向 | 索引 | 对应物理量 | 后续处理 |
|---|---|---|---|
| 行方向 | pulse_idx | 慢时间 / 脉冲序号 | Doppler FFT 沿这个方向做 |
| 列方向 | fast_idx | 快时间采样点 | 距离压缩沿这个方向做 |
这个约定和第 3 章的 rx_matrix 保持一致。若程序采用相反约定也能工作,但每一个 fft(..., dim)、conv 循环和 imagesc 坐标都要同步改变。教材里不混用两套约定。
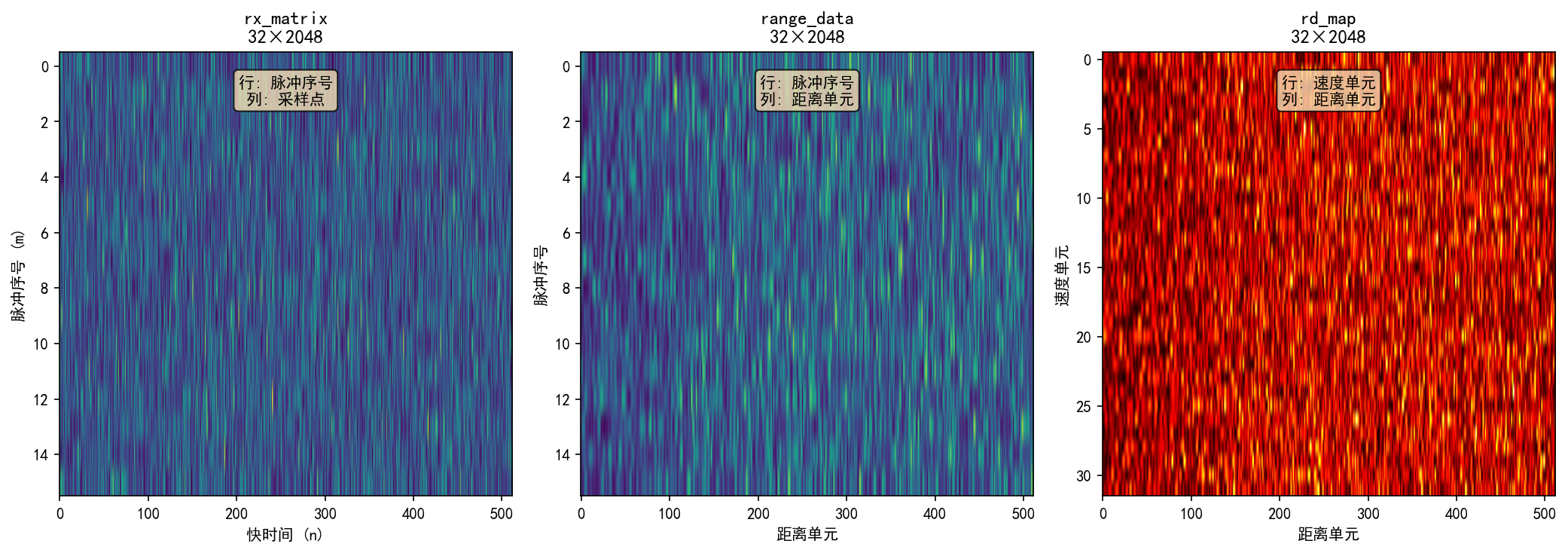
图8.3 展示了数据在处理链中的维度变化(图中只显示部分采样点作为示意)。rx_matrix 和 range_data 的尺寸相同,但列的物理含义已经从"采样点"变成"距离单元"。rd_map 的行方向则从"脉冲序号"变成"速度单元"。
8.4 距离压缩得到 range_data
沿快时间做匹配滤波
rx_matrix 的每一行是一发脉冲的回波。距离压缩要在这一行内部做匹配滤波,把延迟后的 LFM 回波压成距离峰。
第 4 章中匹配滤波写成
程序里的主要片段是:
range_data = zeros(size(rx_matrix));
for pulse_idx = 1:size(rx_matrix, 1)
range_data(pulse_idx, :) = conv(rx_matrix(pulse_idx, :), mf, 'same');
end这里的 pulse_idx 固定一发脉冲,: 取出这一发脉冲内的全部快时间采样点。conv(..., 'same') 保持输出长度和输入长度相同,所以 range_data 的尺寸仍然是 Npulse x Nfast。
处理前后最容易混淆的是列方向含义。rx_matrix 的列只是快时间采样点;range_data 的列已经可以配上距离轴。它仍然不是最终目标,只是每发脉冲上的距离压缩结果。
距离轴和群延迟修正
匹配滤波器有长度。使用 conv(..., 'same') 时,输出保留中心段,距离轴要扣除匹配滤波器的中心偏移:
group_delay = floor(length(mf) / 2);
Nfast = size(rx_matrix, 2);
range_axis = ((0:Nfast-1) - group_delay) * scene.c / (2 * scene.fs);这行距离轴来自第 4 章的测距公式:采样点先换成时间,再由时间换成距离。
其中 $n_0$ 就是 group_delay。若不扣除这个偏移,距离估计会系统性偏大。
8.5 Doppler 处理得到 rd_map
沿慢时间做 FFT
距离压缩完成后,range_data 的每一列是同一个距离单元在不同脉冲之间的慢时间序列。第 5 章已经讲过,这个序列的频谱就是 Doppler 谱。
程序里写成:
rd_map = fftshift(fft(range_data, [], 1), 1);
rd_power = abs(rd_map);
rd_power = rd_power / max(rd_power(:));这里 fft(..., [], 1) 的最后一个参数 1 表示沿第一维处理。因为本书约定 range_data 的行是脉冲序号,所以 Doppler FFT 沿第 1 维做。
做完这一步后,行方向的含义变了:原来是第几发脉冲,现在是 Doppler bin 或速度 bin。列方向仍然对应距离。
| 变量 | 行方向 | 列方向 |
|---|---|---|
range_data | 脉冲序号 | 距离相关采样点 |
rd_map | Doppler / 速度 bin | range bin |
这一步容易出错。rd_map 看起来仍然是二维矩阵,但它已经不再是一张脉冲-快时间表。
速度轴和 fftshift
双边复 I/Q 序列的 Doppler 频率范围写成
因此速度轴写成:
Npulse = scene.Npulse;
doppler_freq = (-Npulse/2:Npulse/2-1) * scene.PRF / Npulse;
vel_axis = doppler_freq * scene.lambda / 2;fftshift 把零 Doppler 移到中间。没有 fftshift 时,速度轴仍按双边方式标,图上的速度位置会错位。
本例中速度分辨率为
代入 $\lambda=0.03\,m$、$\text{PRF}=5000\,Hz$、$N=32$,得到
所以目标速度不一定正好落在某一个速度 bin 上,实际峰值会出现在最接近的 bin 附近。
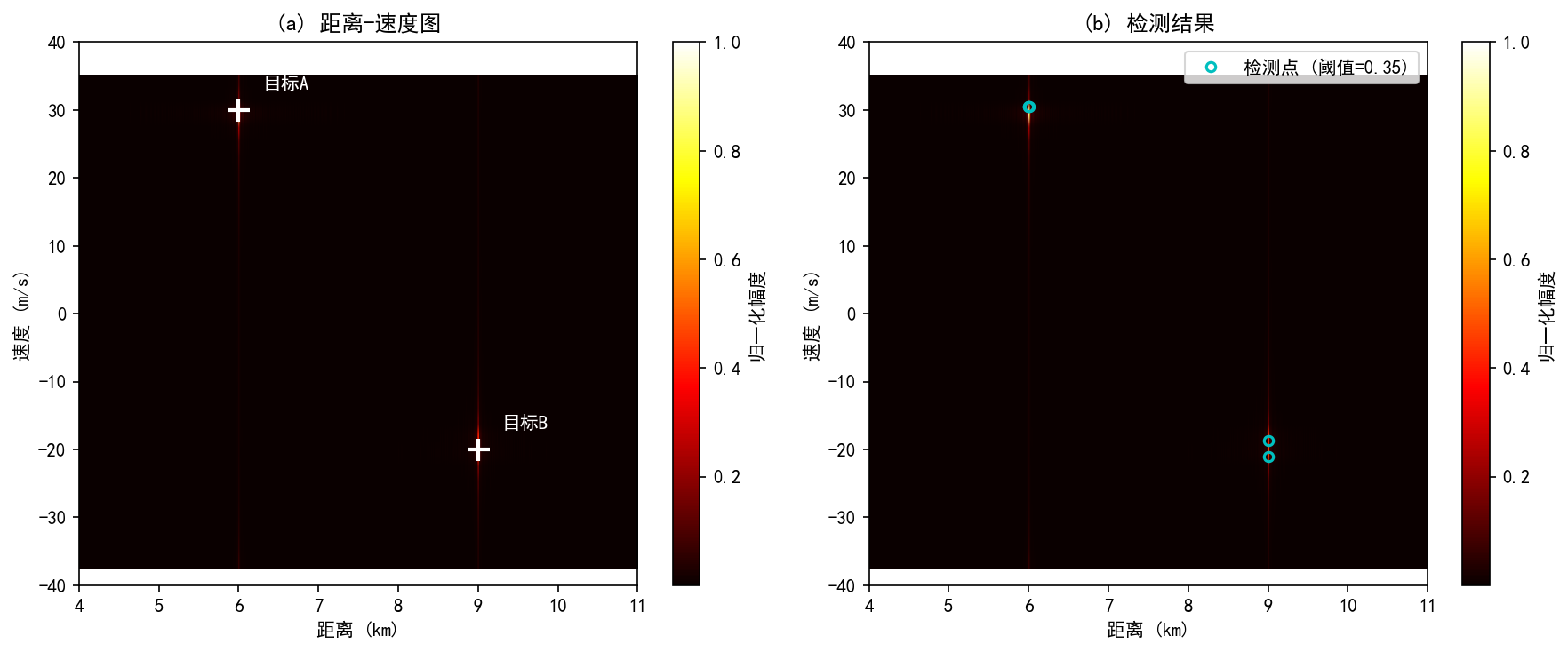
图8.2 展示了距离-速度图的细节。左图标注了两个目标的真实位置,右图叠加了检测结果。有的目标附近会出现多个检测点,这是因为主瓣展宽和固定阈值的共同作用。
8.6 从 rd_map 到 det_mask
固定阈值先跑通
距离-速度图上的亮点还不是目标表。第 6 章已经讲过,图上的响应可能来自目标,也可能来自噪声、旁瓣或杂波。检测要把连续幅度图变成 0/1 掩码。
最小实现先用固定阈值:
threshold = 0.35;
det_mask = rd_power > threshold;
[row_idx, col_idx] = find(det_mask);det_mask 和 rd_map 使用同一套行列坐标。det_mask(row, col)=1 表示 rd_map(row, col) 这个距离-速度单元通过检测。
固定阈值适合先跑通处理链。它的局限也很明显:背景不均匀、旁瓣高、强弱目标差距大时,一个全局阈值很难兼顾整张图。第 6 章讲过的 CFAR 可以替换这个检测模块,但第 8 章不展开二维 CFAR 代码。
检测掩码的常见误读
det_mask 中的 1 不一定一一对应目标。一个目标的主瓣附近可能有多个相邻格子越过阈值,强目标旁瓣也可能触发检测。实际输出目标表前,通常还要做局部峰值保留或点迹凝聚。
一个简化的局部峰值保留:
is_peak = imregionalmax(rd_power);
det_mask = (rd_power > threshold) & is_peak;
[row_idx, col_idx] = find(det_mask);这段代码需要图像处理工具箱。没有这个工具箱时,也可以用第 6 章的点迹凝聚思路:先找到通过阈值的区域,再取每个区域内响应最大的格子作为代表点。
8.7 从检测掩码到目标表
索引到物理量的换算
find(det_mask) 返回的是行列索引,还不是距离和速度。换算关系写成:
range_est = range_axis(col_idx);
vel_est = vel_axis(row_idx);其中 range_axis 对应距离坐标轴,vel_axis 对应速度坐标轴。这两个轴在前面的距离压缩和 Doppler 处理中已经生成。
到这一步,前面得到的距离-速度图才真正转化为可以汇报的目标结果。
目标表的组织
最简单的目标表只保留距离、速度和响应强度:
target_list = table(range_est, vel_est, rd_power(sub2ind(size(rd_power), row_idx, col_idx)), ...
'VariableNames', {'Range', 'Velocity', 'Power'});实际工程中,目标表还会包含检测时刻、信噪比估计、角度信息等字段。第 7 章讲过的角度测量可以在这里并入目标表。
8.8 参数变化练习
练习 1:改变目标距离。把目标 A 的距离从 $6\,km$ 改成 $7\,km$,观察 range_data 的距离峰和 rd_map 中亮点的横向位置。速度位置不应明显改变。
练习 2:改变目标速度。把目标 B 的速度从 $-20\,m/s$ 改成 $+20\,m/s$,观察 rd_map 中亮点从负速度一侧移动到正速度一侧。距离位置不应明显改变。
练习 3:降低脉冲数。把 Npulse 从 32 改成 16。速度 bin 变粗,rd_map 的速度向分辨能力下降。这个变化对应第 5 章的 CPI 与速度分辨率关系。
练习 4:降低 PRF。把 PRF 从 $5\,kHz$ 改成 $2\,kHz$。最大不模糊速度变成 $15\,m/s$,目标 A 的 $+30\,m/s$ 会折叠到 $0\,m/s$ 附近,目标 B 的 $-20\,m/s$ 会折叠到 $+10\,m/s$ 附近。观察 vel_axis 的范围和峰值位置变化。
练习 5:调整阈值。把 threshold 从 0.35 改成 0.2 和 0.6。阈值降低时检测点会增多,阈值升高时弱目标更容易消失。这个练习对应第 6 章的虚警和漏检取舍。
练习 6:加入一个强零速度杂波。在某个距离附近加入速度为 $0\,m/s$、幅度较大的回波。距离-速度图上零速度附近会出现强响应,检测模块可能优先报出它。这个练习用来连接第 5 章的零 Doppler 杂波和第 6 章的检测限制。
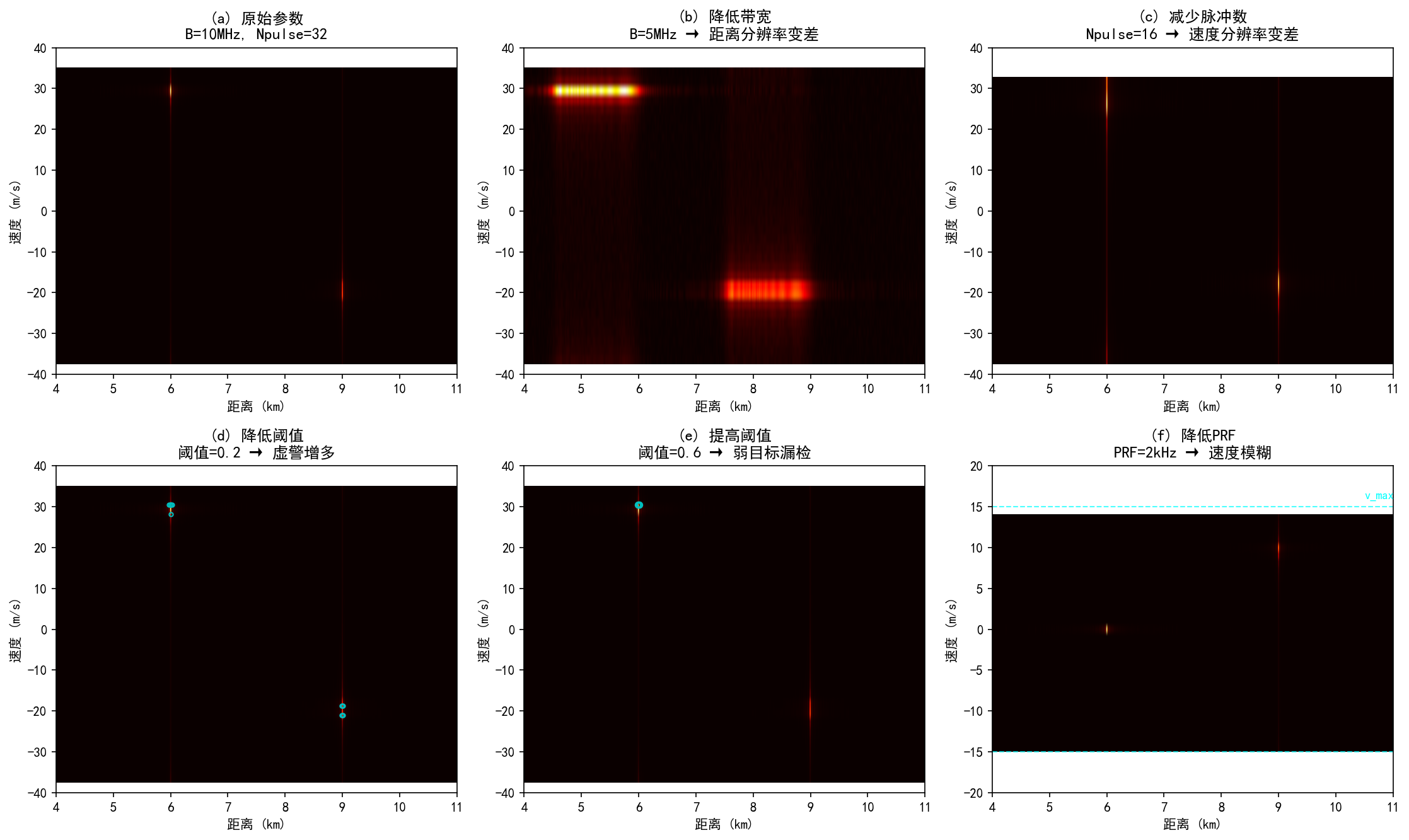
图8.4 展示了不同参数设置对处理结果的影响。左列是原始设置,右列分别展示了改变带宽、脉冲数和 PRF 后的效果。
跑完这些练习后,目标不再只是图上的亮点。它从 scene 中的真值出发,经过 rx_matrix、range_data、rd_map 和 det_mask,最后变成 target_list 中的一行。能解释这条路径,就能把这份 MATLAB 处理流程和前面几章的公式接起来。