第5章 速度测量
5.1 多普勒效应与径向速度
第4章解决的是“目标离我多远”。速度测量接着问:目标是在靠近、远离,还是几乎不动?如果它在动,速度是多少?
这件事的入口仍然是多普勒效应。你在路边听到救护车迎面开来时声音变尖,开过去以后声音变低;雷达看到的电磁波也会发生类似的频率变化。速度测量要把三件事连起来:频移为什么出现,频移怎样测出来,在脉冲雷达里它为什么会变成同一距离单元上的相位转动。
从声音的频率变化说起
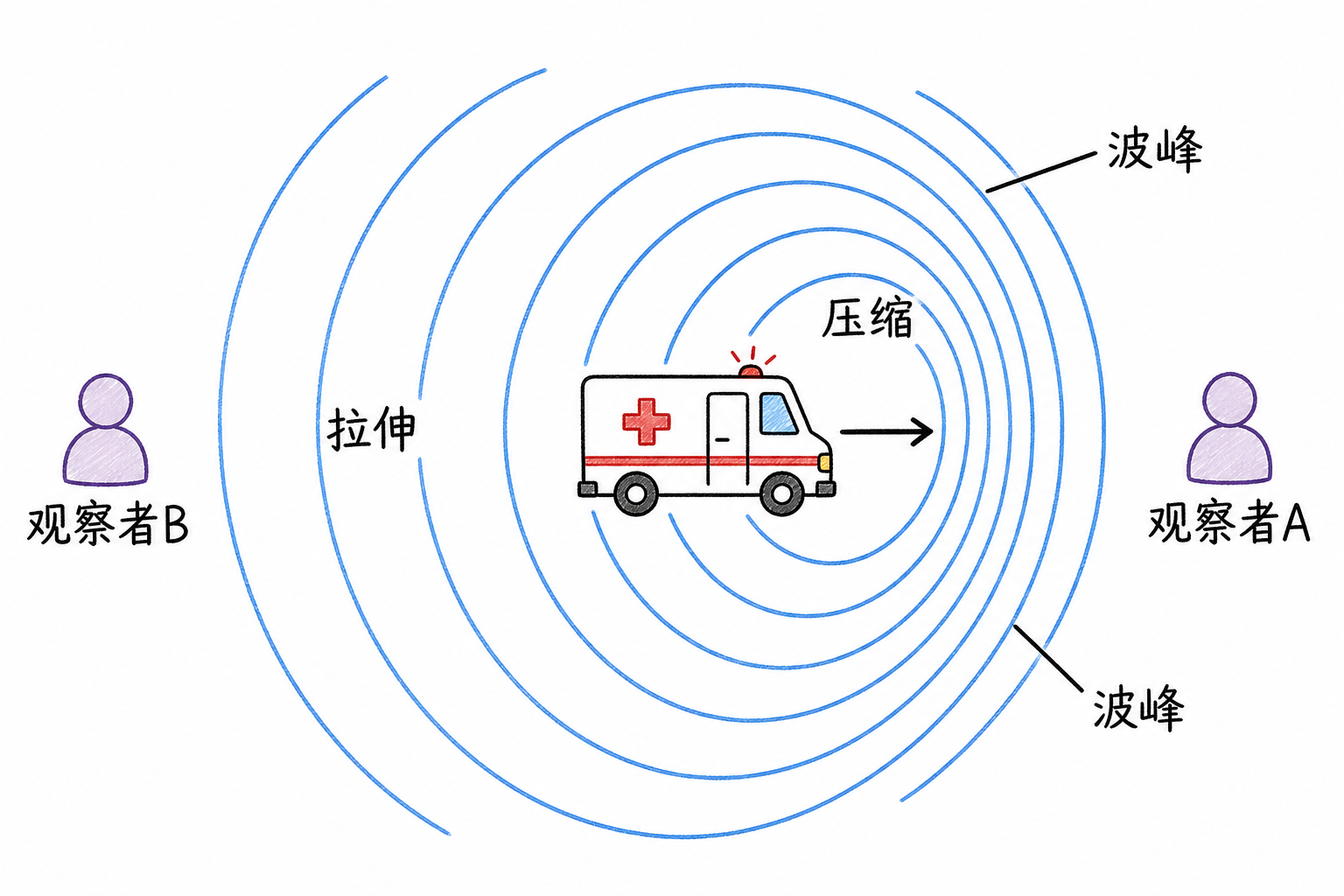
你站在路边,救护车从远处驶来,警笛声会变尖;车开过去以后,声音又变低。这个现象每个人都听过,它有个专门的名字:多普勒效应。声源和观察者之间有相对运动时,观察者接收到的频率会发生变化。
先用声音建立直觉。设救护车静止时发出 $f_0=1000\,Hz$ 的声音,声速近似为 $v_s=340\,m/s$。这意味着每秒有 1000 个波峰从喇叭发出,并且均匀分布在空间中。救护车静止时,相邻两个波峰之间的距离为
如果救护车以 $v=30\,m/s$ 向观察者驶来,喇叭仍然每秒发出 1000 个波峰,但后一个波峰发出时,车已经向前移动了一段距离。前方波峰间距被压缩,你站在路边不动,单位时间内经过你的波峰数量变多了。此时观察者接收到的频率近似为
频率升高,声音听起来更尖。若救护车远离观察者,波峰间距被拉长,接收频率变为
频率降低,声音听起来更低。
雷达发射的是电磁波,不是声波。差别在于电磁波以光速 $c\approx3\times10^8\,m/s$ 传播,而且雷达回波经历了“雷达到目标、目标再回到雷达”的双程路径。目标朝雷达运动时,回波频率会升高;目标远离雷达时,回波频率会降低。
在雷达测速里,通常只需要低速近似。目标径向速度为 $v_r$,发射频率为 $f_0$,波长为 $\lambda=c/f_0$,多普勒频移可写成
反过来,测到多普勒频移 $f_d$ 后,径向速度为
这里的因子 $2$ 来自双程传播。电磁波去程受目标运动影响一次,回程又受影响一次,所以雷达多普勒频移约为单程情况的两倍。
雷达看到的是径向速度
公式里的 $v_r$ 表示目标沿雷达视线方向的速度分量,它只取真实速度在视线方向上的那一部分。若目标真实速度为 $v$,运动方向与雷达视线夹角为 $\theta$,则
本书约定:目标靠近雷达时,径向速度 $v_r$ 为正,多普勒频移 $f_d$ 也为正;目标远离雷达时二者为负。不同教材和系统可能采用相反约定,读公式时要先看清符号方向。
目标正对雷达飞来时,$\theta=0$,径向速度等于真实速度。目标横向飞过雷达时,$\theta=90^\circ$,径向速度接近 0,即使它本身飞得很快,多普勒频移也很小。
如果想逗一个只看多普勒的雷达,可以绕着它转圈。速度方向始终接近切向,径向速度接近 0;目标当然在动,只是没有沿雷达视线方向靠近或远离,所以在多普勒维度上更像静止背景。
看一组数量级:
| 场景 | 雷达频率 / 波长 | 径向速度 | 多普勒频移 |
|---|---|---|---|
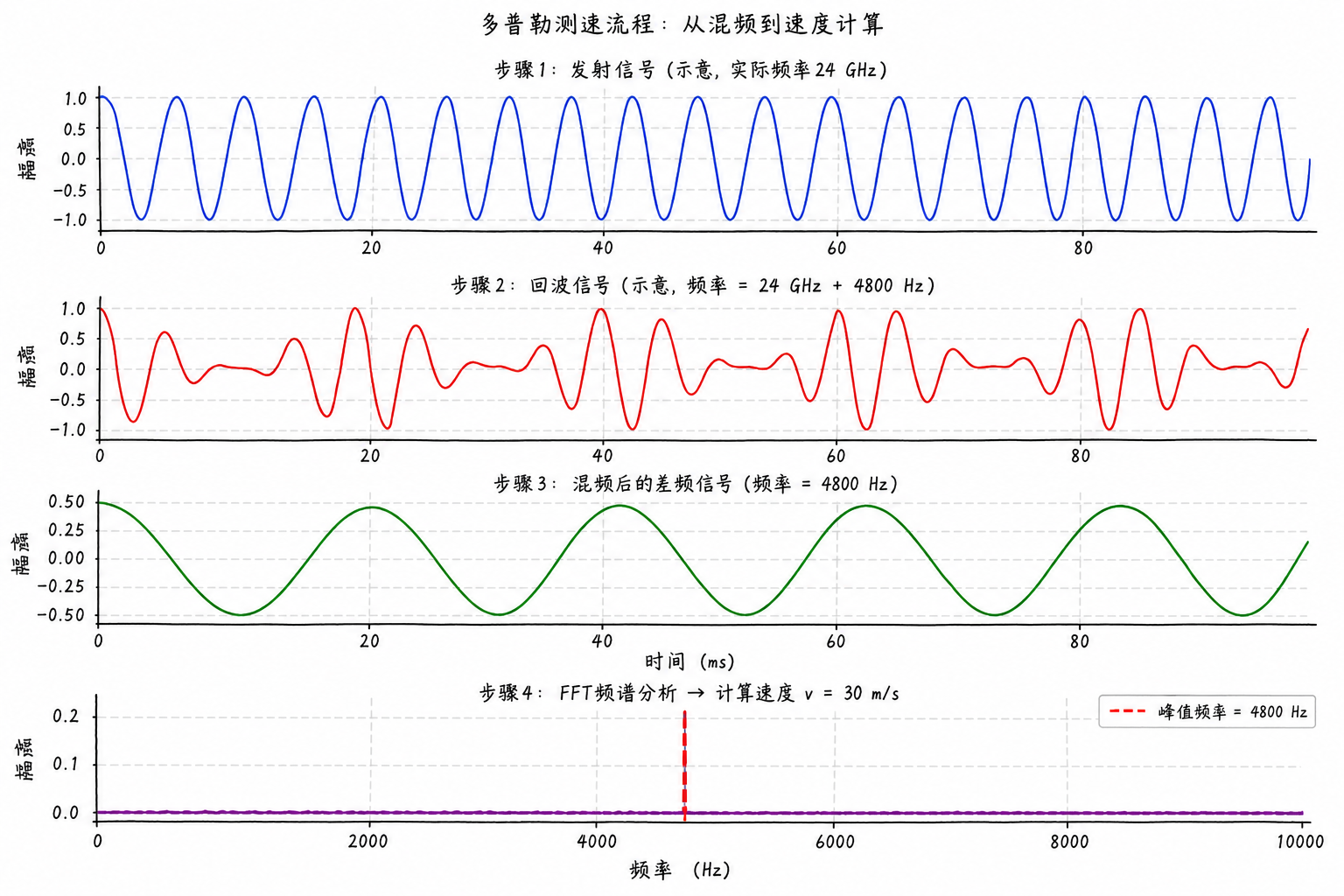
| 汽车测速 | $f_0=24\,GHz$,$\lambda=0.0125\,m$ | $30\,m/s$ | $4.8\,kHz$ |
| 气象雷达 | $f_0=3\,GHz$,$\lambda=0.1\,m$ | $10\,m/s$ | $200\,Hz$ |
| 高速飞行目标 | $f_0=10\,GHz$,$\lambda=0.03\,m$ | $600\,m/s$ | $40\,kHz$ |
同样的速度,在更高载频下会产生更大的多普勒频移。频移更大,测起来更容易;但系统也要能处理相应的频率范围。
5.2 连续波测速与频率测量
混频得到低频差频
结构最简单的测速雷达是单频连续波雷达,也就是这里说的 CW 雷达。它持续发射单频信号,同时接收目标回波。若目标在运动,回波频率相对发射频率偏移 $f_d$。
公式已经说明,测出 $f_d$ 就能算速度。麻烦在于怎样把这个很小的频率偏移测准:回波信号很弱,载频又常在 GHz 量级,而多普勒频移往往只有 Hz 到 kHz 量级。
设发射信号为
回波信号近似为
如果对 $24\,GHz$ 原始射频信号做 FFT,按采样定理至少需要 $48\,GHz$ 以上的采样率,硬件成本和数据量都很难承受。接收机通常先把发射信号和回波信号相乘,这一步叫混频:
乘积里有两个频率成分:一个是差频 $f_d$,通常在 Hz 到 kHz 量级;另一个是和频 $2f_0+f_d$,仍然在 GHz 量级。低通滤波器滤掉和频项后,只留下差频信号
这时再采样、做 FFT,就可以测出 $f_d$。最后代入
得到径向速度。
实际接收机常用 I/Q 混频,得到复数形式的差频信号 $e^{j2\pi f_dt}$。复数差频信号保留了正负频率信息,因此可以区分目标靠近还是远离。
连续波雷达的局限
CW 雷达结构简单,适合只关心速度的场景,比如手持测速枪。它的限制也很清楚:连续波一直在发射,接收机很难从“回波晚到多久”判断距离。没有调制或其他辅助设计时,普通 CW 雷达不能像脉冲雷达那样直接用时间延迟测距。
脉冲雷达的处理方式不同。它先利用第4章的距离处理确定目标落在哪个距离单元,再观察这个距离单元在多发脉冲之间的复数变化。在脉冲雷达里,速度信息表现为慢时间上的相位转动。
| 体制 | 速度信息在哪里 | 主要处理动作 | 直接测距能力 |
|---|---|---|---|
| 单频 CW 雷达 | 混频后的差频信号 | 对差频信号做 FFT | 不能直接测距 |
| 脉冲多普勒雷达 | 同一距离单元的慢时间相位 | 沿脉冲序号做 FFT | 可由时间延迟测距 |
| FMCW 雷达 | 拍频与多普勒共同作用 | 快时间 / 慢时间二维处理 | 可测距,但路径不同 |
这里的 CW 特指不调制的单频连续波;FMCW 虽然也是连续发射,但因为频率在扫动,测距和测速的处理路径都不同,不能把它和单频 CW 的差频测速公式混成一套。
5.3 脉冲间相位与慢时间 FFT
固定一个距离单元
上一节主要站在单频 CW 雷达的角度讨论测速:先把高频回波混到低频,再从频率偏移算速度。脉冲雷达里的速度信息体现在相邻脉冲之间的相位变化中。
第4章已经得到距离像。对一发脉冲来说,距离像横轴是距离单元,峰值位置对应目标距离。只看这一发脉冲,你最多知道某个距离单元里有没有较强回波,却很难判断它是静止、靠近还是远离。现在连续发射 $N$ 个脉冲,每一发脉冲都经过距离压缩,就会得到 $N$ 条距离像。
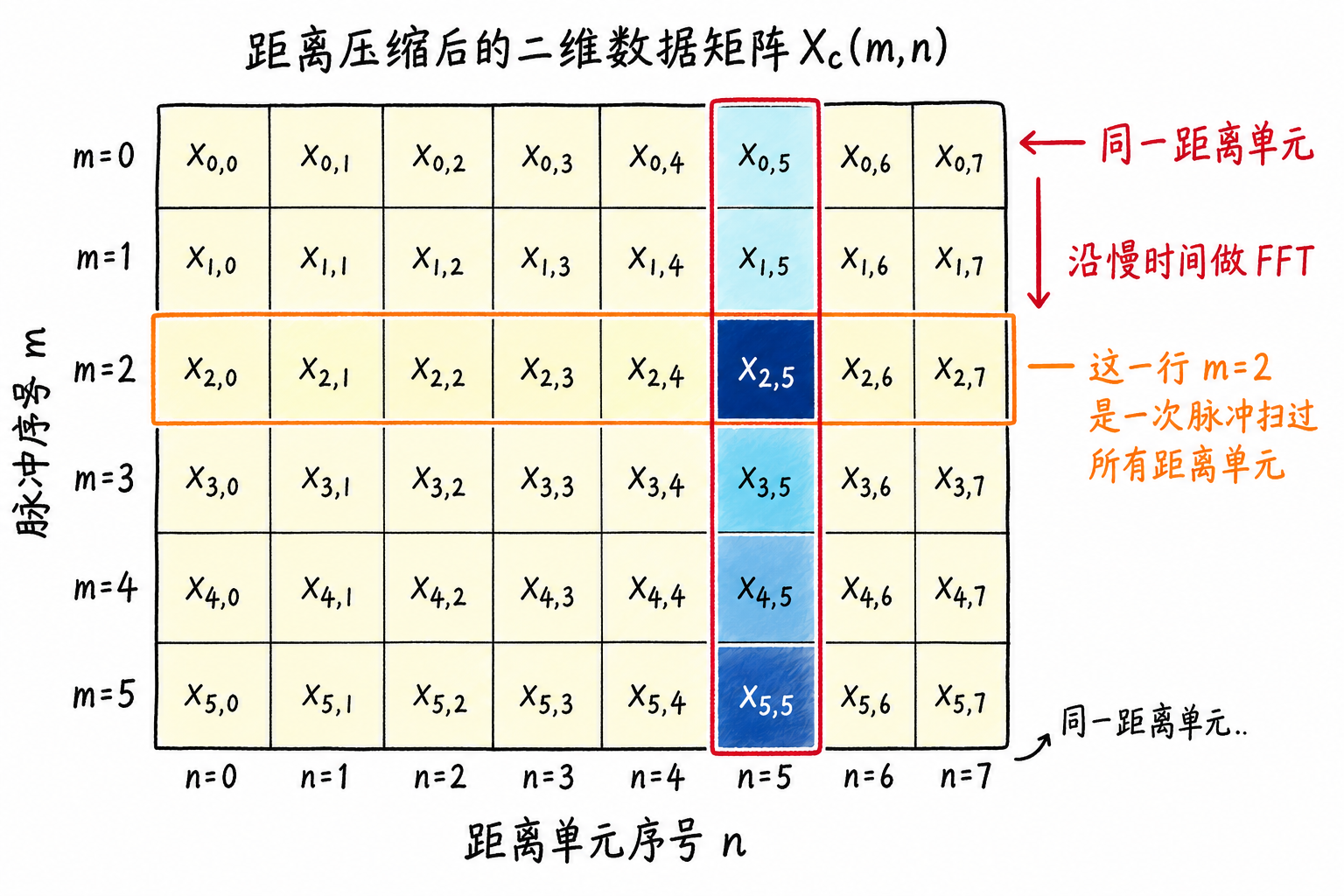
把这些距离像按脉冲序号排起来,就得到一个二维矩阵。横向是快时间处理后的距离单元,纵向是脉冲序号,也叫慢时间。若某个目标落在第 $n_0$ 个距离单元,就固定这一列,取出
这里 $X_c(m,n)$ 表示第 $m$ 发脉冲距离压缩后的第 $n$ 个距离单元复数值。$z[m]$ 就是同一距离单元沿慢时间方向的一串复数样本。
快时间是单个脉冲内部的采样轴,采样间隔通常很短;慢时间是脉冲与脉冲之间的采样轴,采样间隔就是 PRI $T_r$。名字里的“快”和“慢”,说的正是这两个采样间隔的差别。图5.3 把这两个采样轴放在同一张矩阵里。
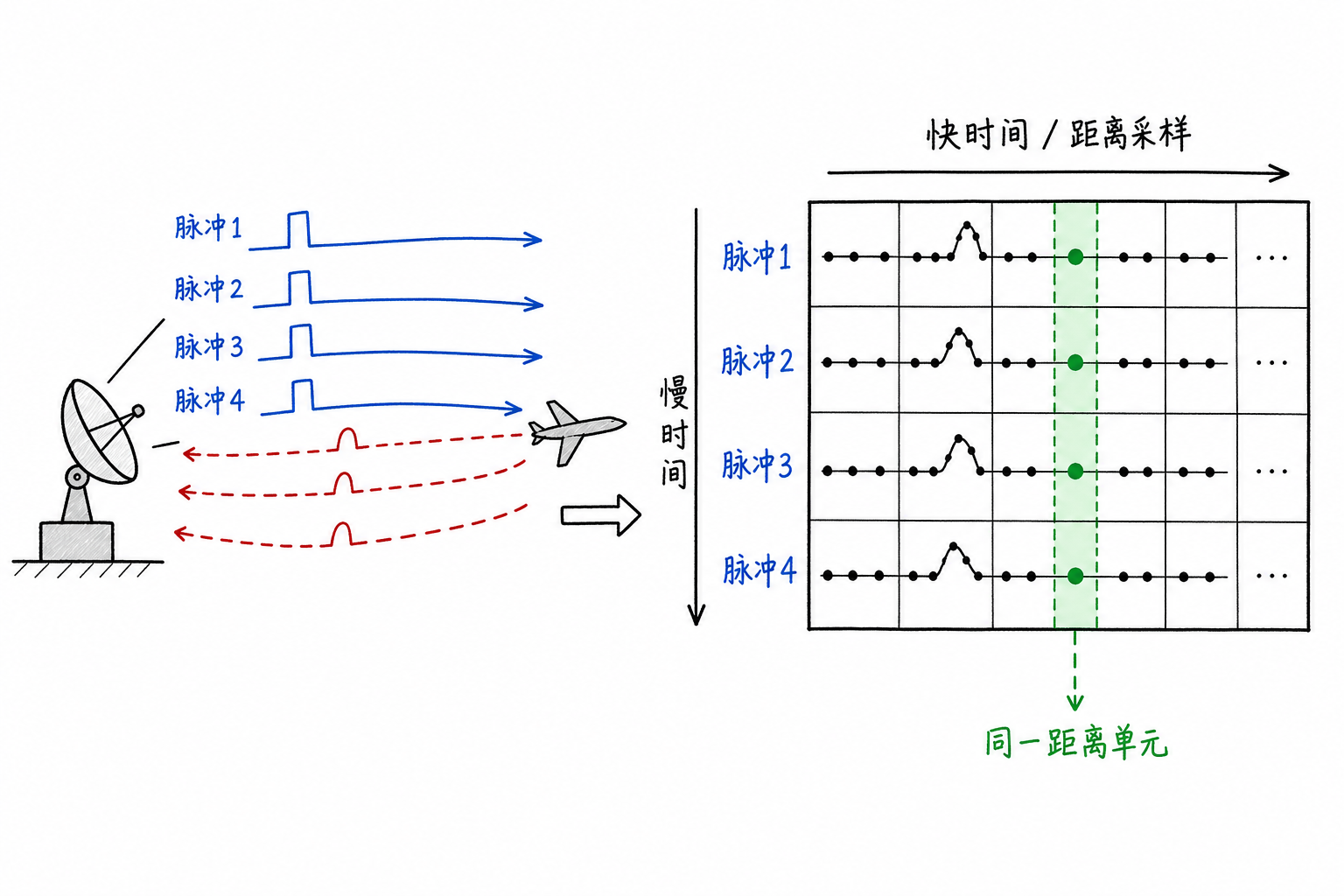
可以把它类比成拍照:一张照片能看出人站在哪里,连续多张按固定时间间隔拍下的照片,才能看出他是不是在持续移动。若目标静止,理想情况下这串复数的相位变化很小;若目标在运动,从一发脉冲到下一发脉冲,目标距离略有变化,往返路程随之变化,相位也会随脉冲序号稳定转动。
设相邻两发脉冲间隔为 $T_r$。目标径向速度为 $v_r$ 时,在一个 PRI 内移动
往返路径变化为
电磁波每走一个波长 $\lambda$,相位转过 $2\pi$。因此相邻脉冲之间的相位差为
利用 $f_d=2v_r/\lambda$,可写成
这个式子把速度、多普勒频率和脉冲间相位差接到了一起:目标速度越大,同一距离单元上的相位转得越快。
从相位差到慢时间 FFT
如果只看相邻两发脉冲,也可以由相位差估计速度:
既然两发脉冲就能算出速度,为什么还要做 FFT?因为两发脉冲只给一次相位差,噪声稍大,估计就会抖动。多个脉冲放在一起时,可以观察整串相位变化规律;同一距离单元里若有两个速度不同的目标,它们也可能在频率上分开。
慢时间序列可写成复指数形式:
其中 $A$ 是幅度,$\phi_0$ 是初始相位。它和第2章的正弦/复指数信号是同一类对象,只是采样间隔换成了 PRI $T_r$。
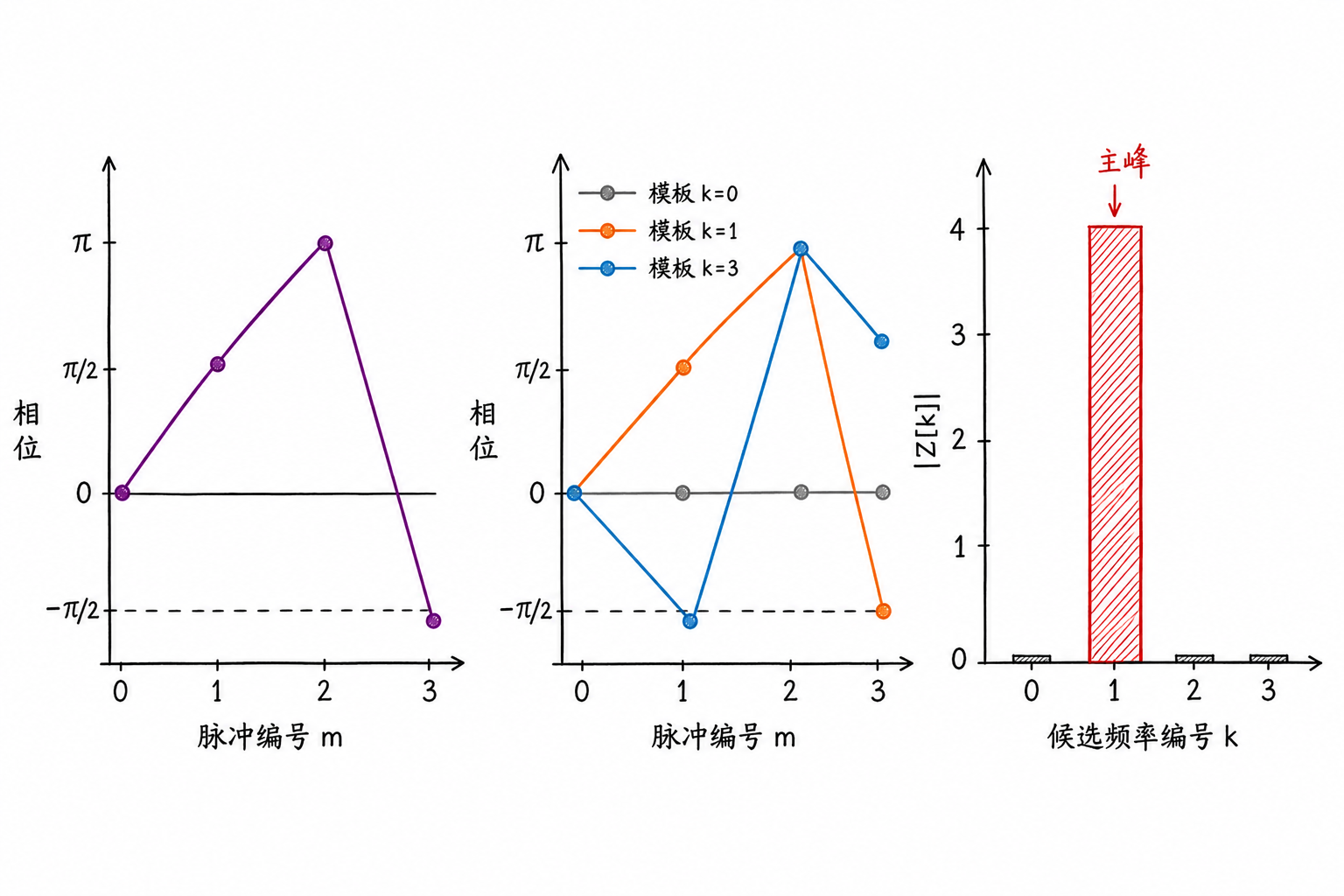
下面用 4 个脉冲的例子看 FFT 在做什么。假设某个目标的径向速度刚好让相邻脉冲间相位差为 $90^\circ$,固定该距离单元后,连续 4 个脉冲上的复数样本可能是
这 4 个复数的相位依次为
每往后一个脉冲,相位多转 $90^\circ$。对这 4 个点做 DFT:
先看 $k=1$:
模板 $e^{-j2\pi m/4}$ 的相位变化速率正好抵消了样本的相位变化,四项变成同方向相加,所以幅度最大。
再看 $k=0$:
$k=0$ 对应相位不转的模板,和这串样本不匹配,累加后相互抵消。
FFT 的峰值位置对应慢时间相位的转动速率。第 $k$ 个 bin 对应的多普勒频率为
若 $N=4$,$T_r=1\,ms$,则 $\text{PRF}=1000\,Hz$。上面的 $k=1$ 对应
也可以反过来检查:$250\,Hz$ 的多普勒频率,在 $T_r=1\,ms$ 的脉冲间隔下,相邻脉冲相位差为
这正好对应前面那串 $1,j,-1,-j$。若雷达工作在 $10\,GHz$,波长 $\lambda=0.03\,m$,速度为
这样,脉冲间相位变化就被转换成了多普勒频率,再转换成径向速度。
5.4 MTD 与距离-速度图
对每个距离单元做慢时间 FFT
上一节只盯着一个距离单元看。实际雷达要处理整张二维数据矩阵:横向区分不同距离,纵向观察同一距离单元在多个脉冲上的变化。
发射 $N$ 个脉冲后,距离压缩输出可以排成一个复数矩阵:
其中 $m$ 是脉冲序号,$n$ 是距离单元。对每一个固定的 $n$,沿 $m$ 方向做 FFT,就得到该距离单元上的多普勒分布。所有距离单元都做完后,结果仍然是一张二维图,只是纵向已经从“脉冲序号”变成了“多普勒频率”或“速度”。
这个处理常称为 MTD(Moving Target Detection)。在本书的入门语境里,可以把 MTD 先理解为:距离处理之后,对每个距离单元分别做慢时间 FFT,把运动目标按多普勒频率分开。
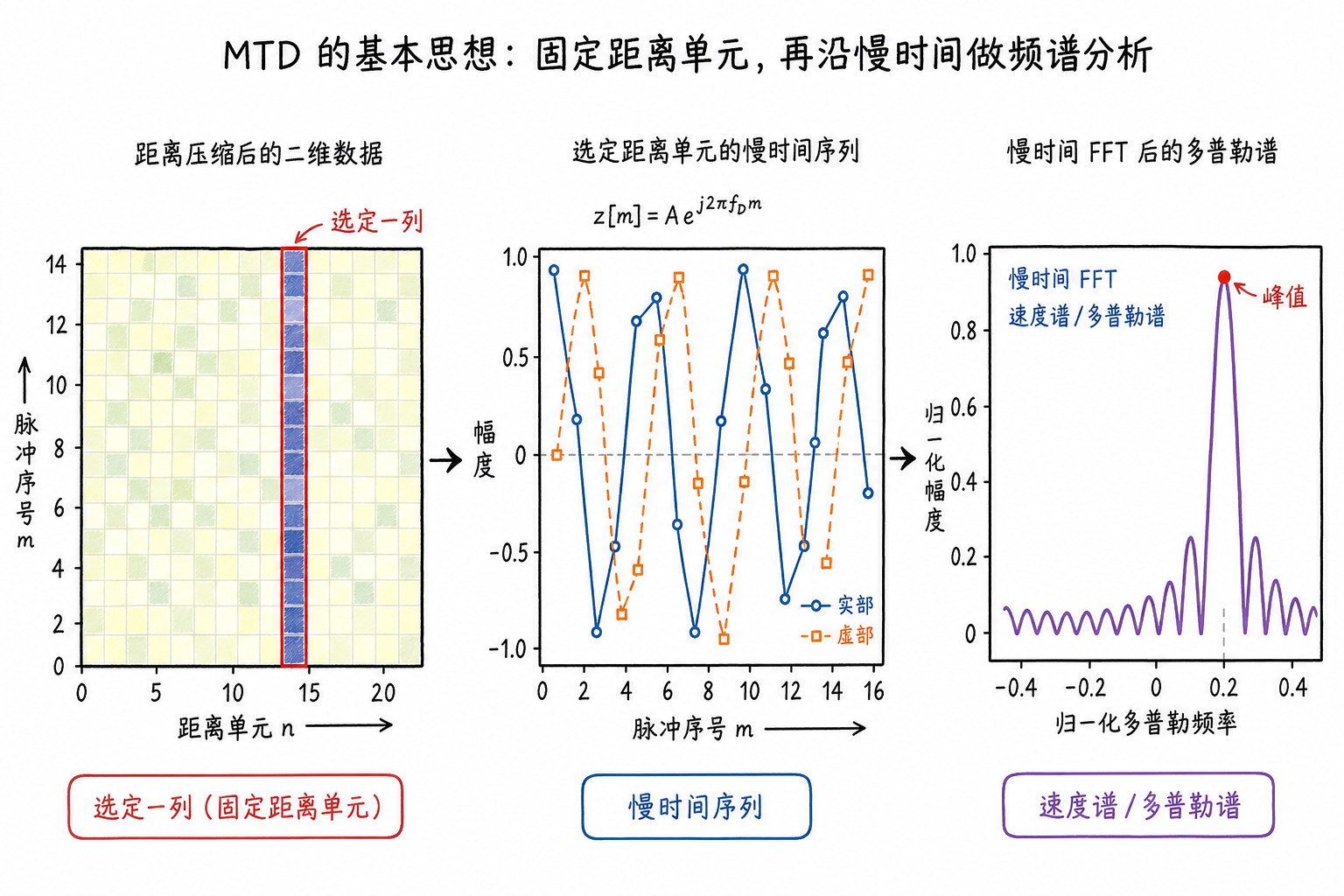
图5.6 左侧是距离压缩后的矩阵。固定某个距离单元后,沿慢时间取出一列复数样本;对这一列做 FFT,就得到该距离位置上的速度谱。对所有列重复这个动作,就得到距离-速度图。
距离-速度图的读法
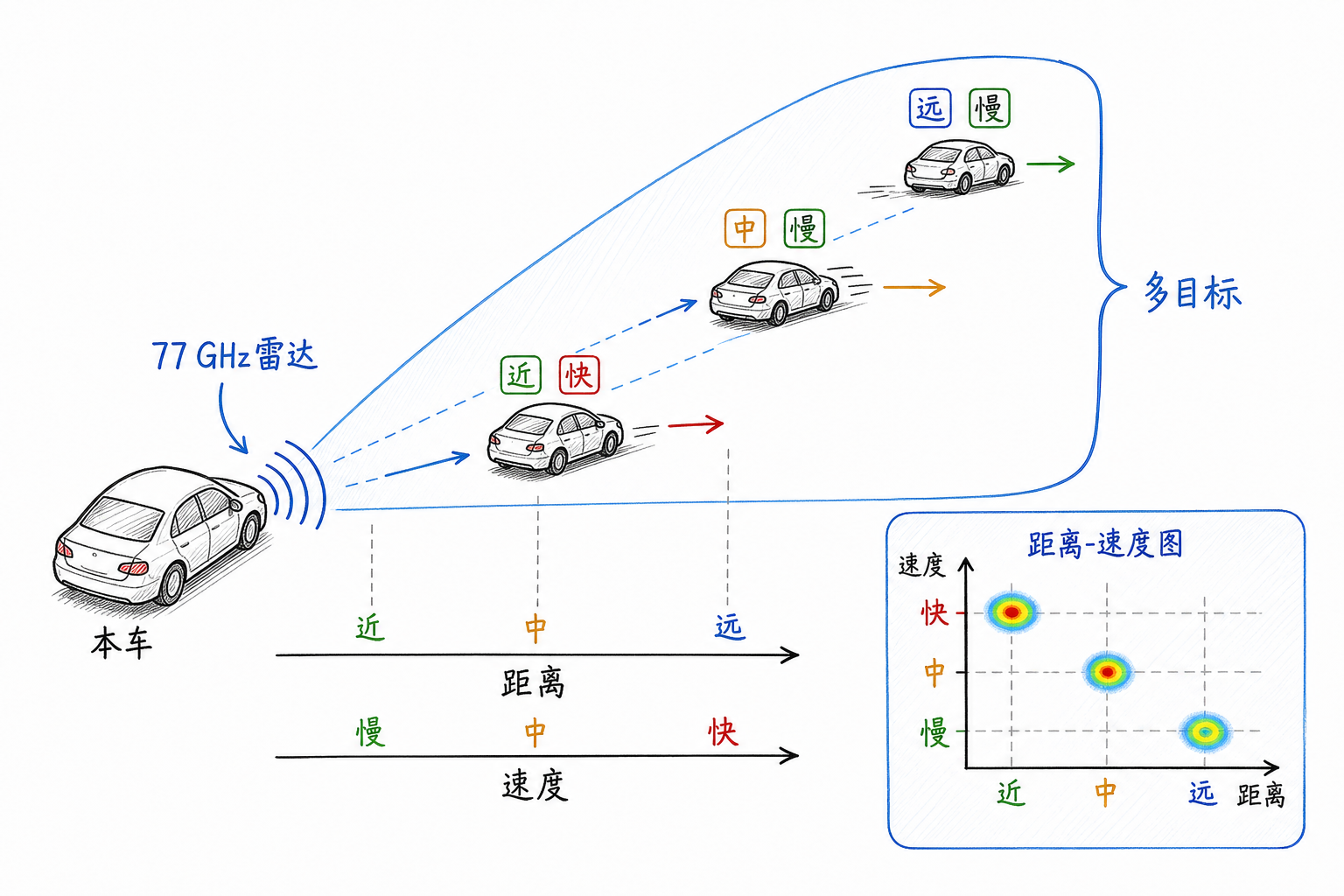
距离-速度图也叫 range-Doppler map。横轴表示距离,纵轴表示多普勒频率或换算后的径向速度,图上每个像素表示某个距离-速度单元的响应强度。
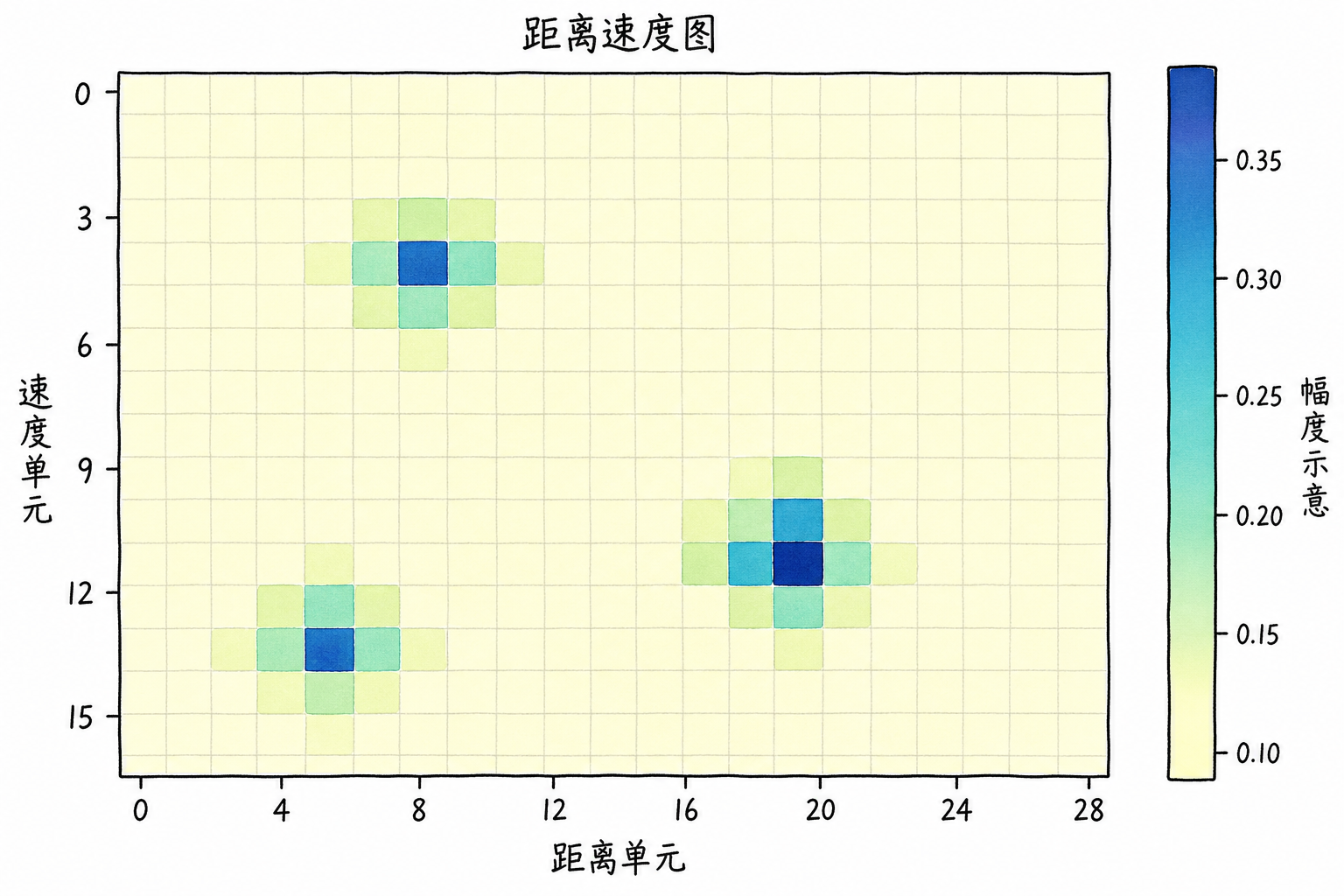
读这类图时,先看亮点横向位置,得到目标可能的距离;再看纵向位置,得到目标可能的径向速度。若某个亮点位于 $15\,km$、$+30\,m/s$ 附近,它表示这个距离-速度单元上有较强响应:目标可能在 15 km 处,并以约 $30\,m/s$ 的径向速度靠近雷达。
这里要区分“响应”和“目标”。距离-速度图上的亮点只是处理结果里的候选响应,可能来自目标,也可能来自噪声、杂波或旁瓣泄漏。雷达是否把它报告为目标,还要经过第6章的阈值和 CFAR 检测;如果一个目标附近出现多个相邻亮点,检测后还要通过点迹凝聚把它们整理成一个目标点迹。
MTD 还有一个好处:静止地面、建筑物等杂波通常集中在零多普勒附近,在图上表现为零速度附近的一条亮带。运动目标若有明显径向速度,会出现在非零速度 bin 上。速度维度由此提供了分离运动目标和静止杂波的抓手。
5.5 速度分辨率、模糊与 PRF 取舍
CPI 与速度分辨率
慢时间 FFT 的频率间隔为
$NT_r$ 是这一次相干处理持续的总时间,称为 CPI(Coherent Processing Interval,相干处理间隔):
因此
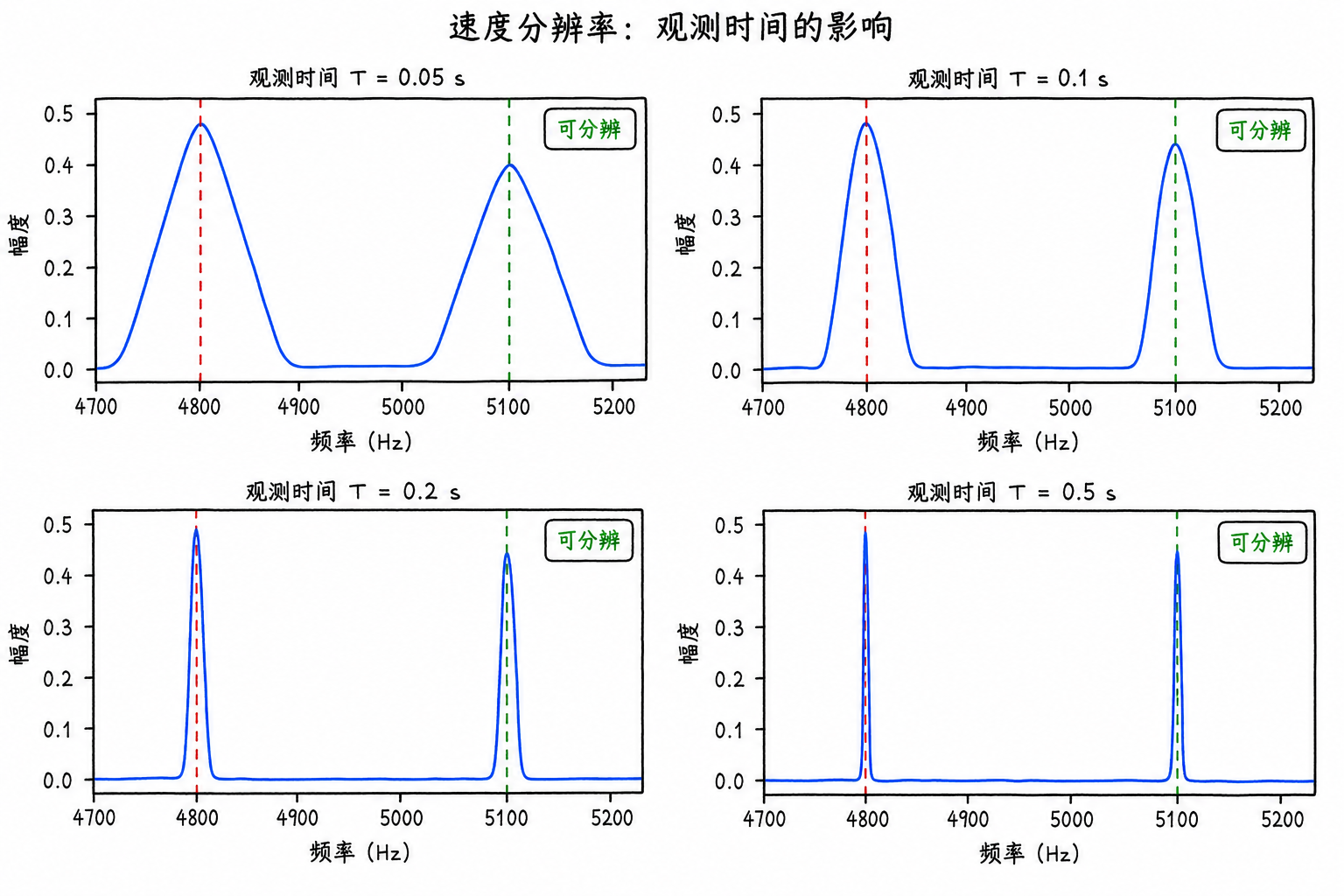
由 $v_r=\lambda f_d/2$,速度分辨率为
它说明的是两个速度接近的目标能否在速度轴上分开。CPI 越长,FFT bin 越密,速度分辨率越细。
例如,$\lambda=0.03\,m$,$T_{\text{CPI}}=0.1\,s$,则
若希望速度分辨率提高到 $0.05\,m/s$,需要
CPI 也不能无限延长。目标加速、机动或跨越距离单元时,慢时间序列不再像一个稳定复指数;雷达还要保持数据更新率,不能为了更细的速度 bin 一直等下去。
PRF 与最大不模糊速度
慢时间采样间隔是 $T_r$,采样率是 $\text{PRF}=1/T_r$。对复 I/Q 慢时间序列,FFT 无歧义频率范围通常写成
超过这个范围,多普勒频率会折叠回来,形成速度模糊。把 $f_d=2v_r/\lambda$ 代入这个范围,有
两边同乘 $\lambda/2$,就得到
这就是本书采用的最大不模糊速度约定。
例如,$\lambda=0.03\,m$,$\text{PRF}=2000\,Hz$,则
如果目标径向速度超过这个范围,FFT 峰值会折叠到另一个速度位置。一个高速靠近目标,可能被显示成低速目标,甚至显示到远离方向。
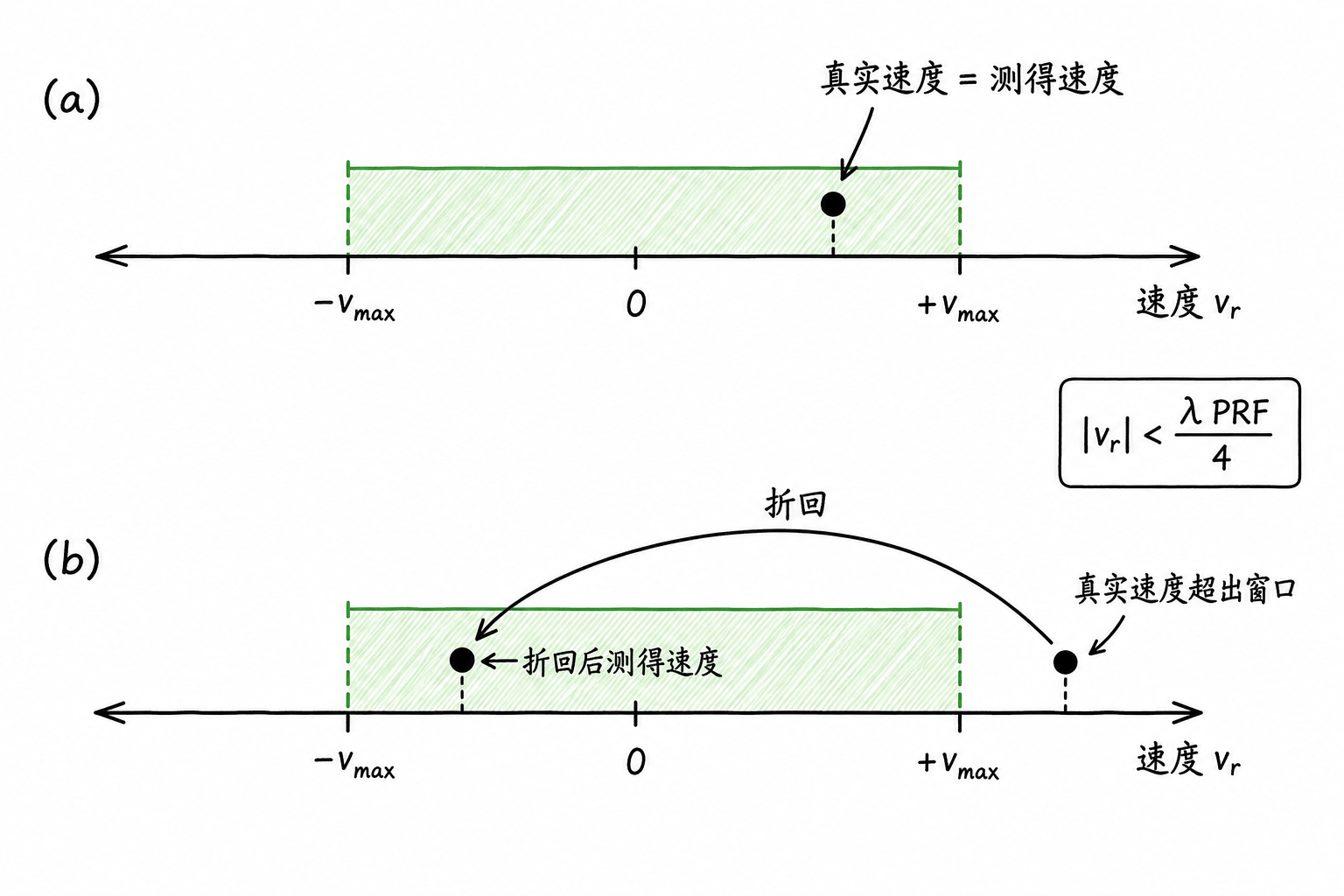
有些教材会写成 $v_{\max}=\lambda\text{PRF}/2$。常见原因是频谱范围、正负方向是否区分、单边/双边显示约定不同。本书按复 I/Q 双边频谱来写,因此分母为 4。
PRF 的距离与速度取舍
PRF 看起来只是一个发射参数,但它同时卡着距离和速度两个维度。第3章已经讲过,脉冲雷达的不模糊距离近似为
PRF 越高,相邻脉冲间隔越短,下一发脉冲很快发出去;远处目标的回波可能在下一发脉冲之后才回来,于是距离容易混淆。另一方面,PRF 越高,慢时间采样率越高,最大不模糊速度越大。
| 参数变化 | 有利的一面 | 代价 |
|---|---|---|
| 提高 PRF | 最大不模糊速度增大 | 不模糊距离减小 |
| 降低 PRF | 不模糊距离增大 | 最大不模糊速度减小 |
| 延长 CPI | 速度分辨率变细 | 数据更新变慢,目标机动影响更明显 |
| 缩短波长 | 同样速度产生更大多普勒频移 | 固定 PRF 下不模糊速度范围变小,对硬件精度和传播环境要求也更高 |
速度分辨率主要由 CPI 决定,不要把它和 PRF 的作用混在一起。若固定 CPI,改变 PRF 主要改变可测速度范围和不模糊距离;若固定脉冲数 $N$,提高 PRF 会让 CPI 变短,速度分辨率反而变粗。
这种距离和速度之间的 PRF 取舍,在雷达教材里常叫 Doppler dilemma。工程系统会用多 PRF、参差 PRF 或其他解模糊方法处理,本书不展开这些算法。
5.6 实际应用
测速枪
交警测速枪通常采用 CW 体制,工作在 24 GHz 或 35 GHz 等频段。它持续发射单频电磁波,接收车辆回波后与本振混频,得到多普勒差频;再对差频信号做 FFT,找到频谱峰值,换算成车速。
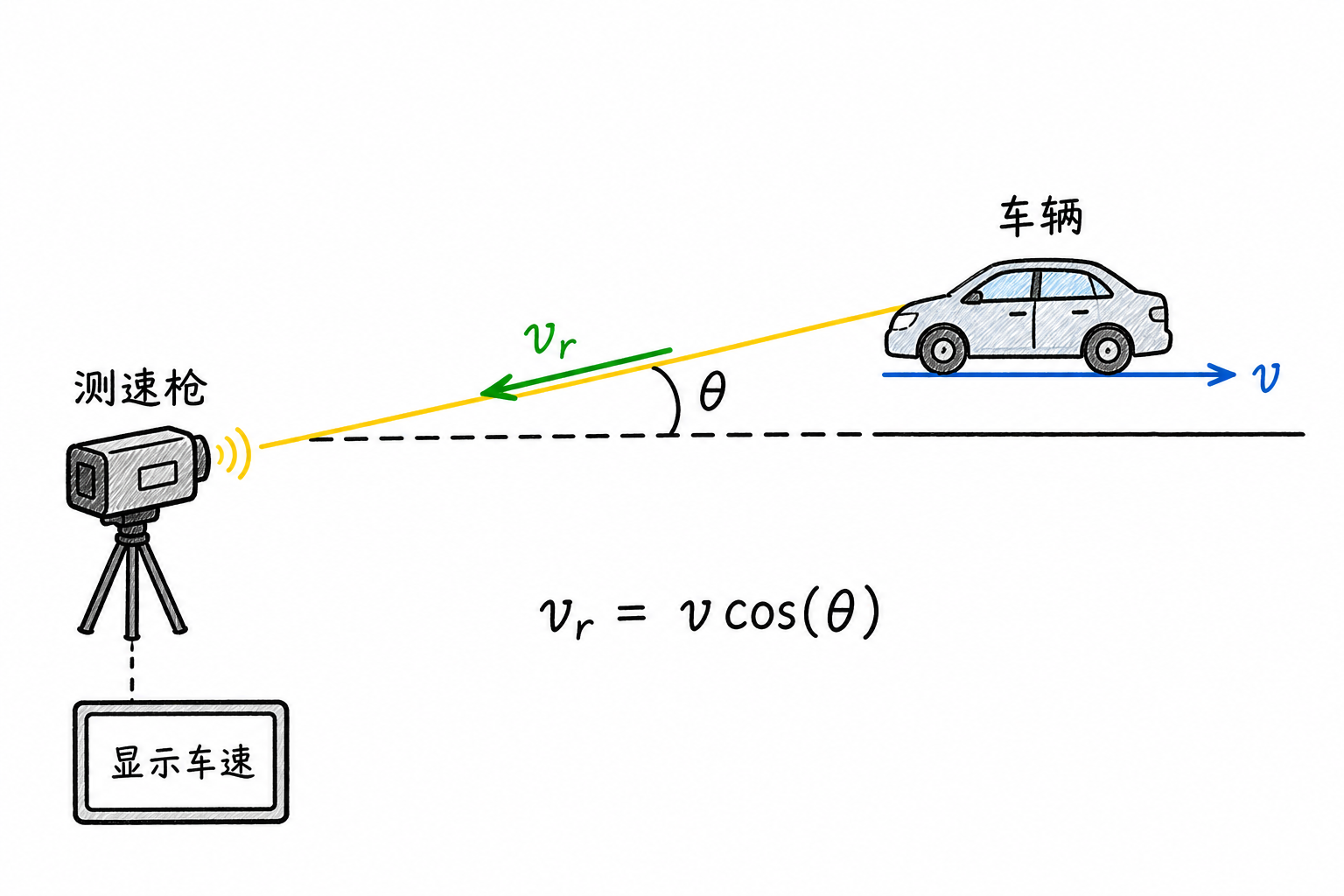
测速枪只需要知道车速,不一定需要知道车辆距离,因此 CW 体制已经够用。它也受角度影响:测速枪与车辆运动方向夹角为 $\theta$ 时,测得的是 $v\cos\theta$。角度越偏,显示速度越低。
气象雷达
气象雷达面对的是雨滴、雪花、冰雹等大量散射体。它不只要知道风速,还要知道这些回波来自哪个距离和方位,因此常采用脉冲多普勒体制。
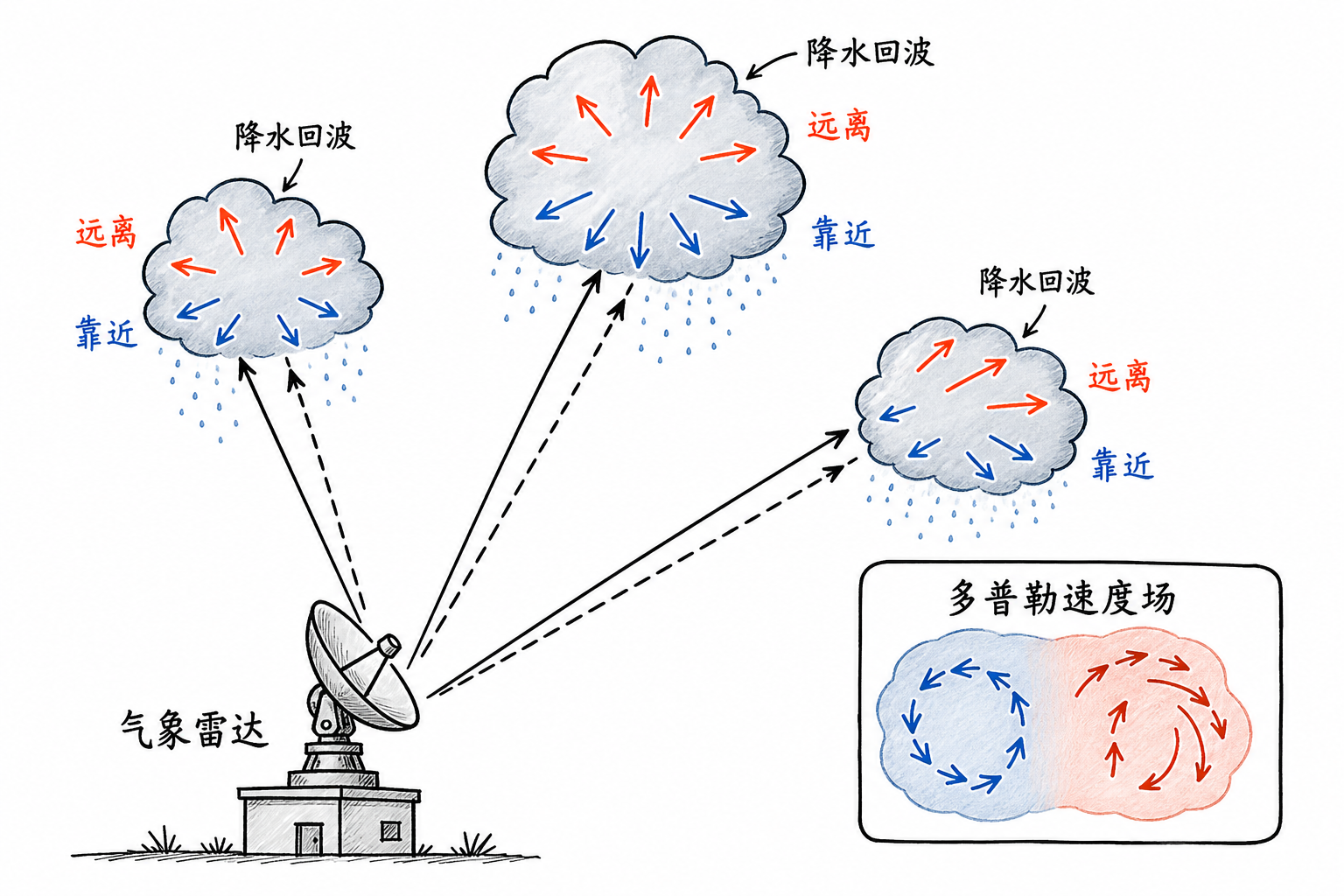
气象雷达先用回波延迟确定降水区域的位置,再用相邻脉冲间的相位变化估计径向速度。若某一区域中相邻位置出现一正一负的强速度,可能提示局部旋转结构;风切变、强对流等现象也会反映在多普勒速度场中。
气象雷达通常需要较大的不模糊距离,因此 PRF 不能随意提高;但 PRF 低又容易带来速度模糊。这也是气象雷达处理中经常要做速度解模糊的原因。
汽车雷达
现代汽车雷达多工作在 77 GHz 频段,常用于自适应巡航、自动紧急制动、盲区监测等功能。它既要测距离,也要测速度,还要处理多个目标。
汽车雷达常用 FMCW 体制。FMCW 也会用到多普勒信息,但距离和速度的提取路径与前面的脉冲多普勒处理不同:它通过线性扫频产生拍频,距离和速度会共同影响混频后的信号,需要用 FMCW 的二维处理方法分开。这里把它作为应用边界,不把 FMCW 公式混入这条脉冲多普勒路径。
实际系统中的问题
杂波会集中在零多普勒附近。地面、建筑物、海面等强回波可能比目标还强,MTI/MTD 的一个任务就是抑制这些低速或零速背景。
多目标会相互叠加。同一距离单元中若有两个速度不同的目标,慢时间 FFT 可能把它们分开;若速度差小于速度分辨率,它们仍会落在同一个 Doppler bin 附近。
高速目标可能发生速度模糊。提高 PRF 可以扩大不模糊速度范围,但会牺牲不模糊距离。工程设计经常是在这些约束之间做取舍。
5.7 小练习
练习 1:基础多普勒换算
一个工作在 $10\,GHz$ 的雷达,测得某目标的多普勒频移为 $3000\,Hz$。目标的径向速度是多少?
解析:先求波长
由速度换算公式
得到
换算成 km/h,约为
练习 2:测速枪的角度误差
交警使用 $24\,GHz$ 测速枪测量车速。测速枪与车辆运动方向成 $30^\circ$ 角,测得多普勒频移为 $4157\,Hz$。车辆真实速度约为多少?
解析:$24\,GHz$ 对应波长
测得的径向速度为
由于
所以
也就是约 $108\,km/h$。
练习 3:CPI 与速度分辨率
某雷达波长为 $0.03\,m$,CPI 为 $0.1\,s$。速度分辨率是多少?若希望速度分辨率达到 $0.05\,m/s$,CPI 需要多长?
解析:
若要求 $\Delta v=0.05\,m/s$,则
练习 4:最大不模糊速度
某脉冲多普勒雷达波长为 $0.03\,m$,PRF 为 $2000\,Hz$。按复 I/Q 双边频谱约定,最大不模糊速度是多少?
解析:
若目标径向速度超过这个范围,慢时间频谱会发生折叠,速度读数可能出现在错误位置。
练习 5:距离-速度图读图
某距离-速度图在 $15\,km$、$+30\,m/s$ 处有一个亮点。这个亮点表示什么?后续还需要做什么?
解析:这个亮点表示在距离 $15\,km$、径向速度约 $+30\,m/s$ 的单元上存在较强回波响应。根据本书约定,正速度表示目标正在靠近雷达。
但它还不是最终目标报告。距离-速度图只给出候选响应,还要用阈值或 CFAR 判断它是否高于周围背景,再决定是否报告为目标。