第1章 雷达是什么
1.1 雷达是什么
打开天气预报,常能看到一张彩色的降雨回波图。它来自天气雷达:雷达向天空发射电磁波,再把云团和雨滴反射回来的回波整理成图。
机场旁边缓慢旋转的监视天线,高速路口的测速设备,汽车前保险杠里的毫米波模块,也都在做类似的事:主动发出电磁波,接收目标反射回来的回波,再从回波里判断前方有什么、在什么位置、是不是在运动。
RADAR 来自 Radio Detection And Ranging,直译为“无线电探测与测距”。这个名字保留了雷达最早的出发点:用无线电波去发现目标,并估计目标距离。后来雷达能做的事越来越多,可以测速度、测方向,也可以参与成像和识别;但这些能力都建立在同一个基础上:先发出电磁波,再从回波里提取信息。
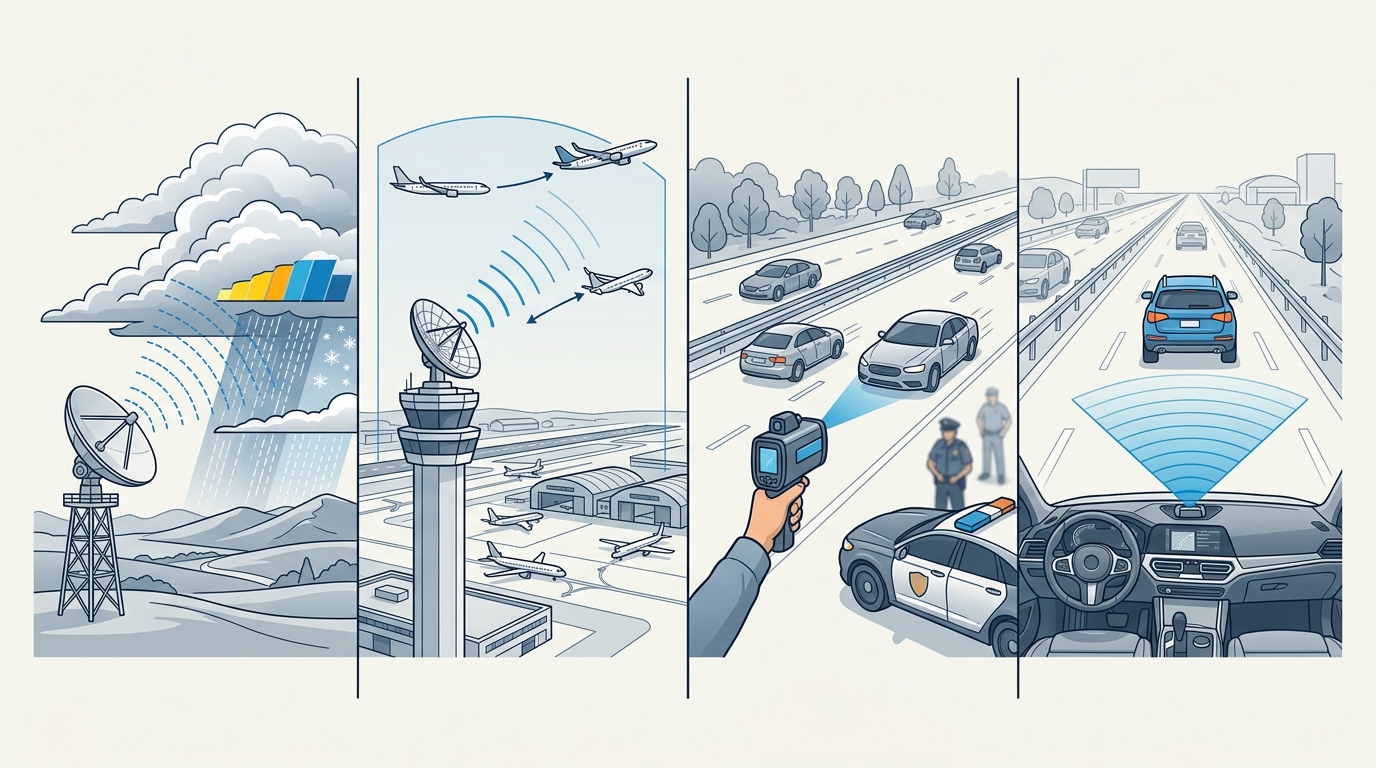
图1.1 把几类常见雷达放在一起。天气雷达关心云团和降雨的位置变化,机场监视雷达关心飞机的方位和距离,高速测速雷达关心车辆是不是在靠近或远离,汽车毫米波雷达关心前车距离和相对速度。应用场景不同,判断依据都来自回波。
雷达要回答的问题可以先概括成四个:远处有没有东西,它离雷达多远,它是不是在运动,它来自哪个方向。雷达信号处理,就是把回波一步步整理成这些问题的答案。
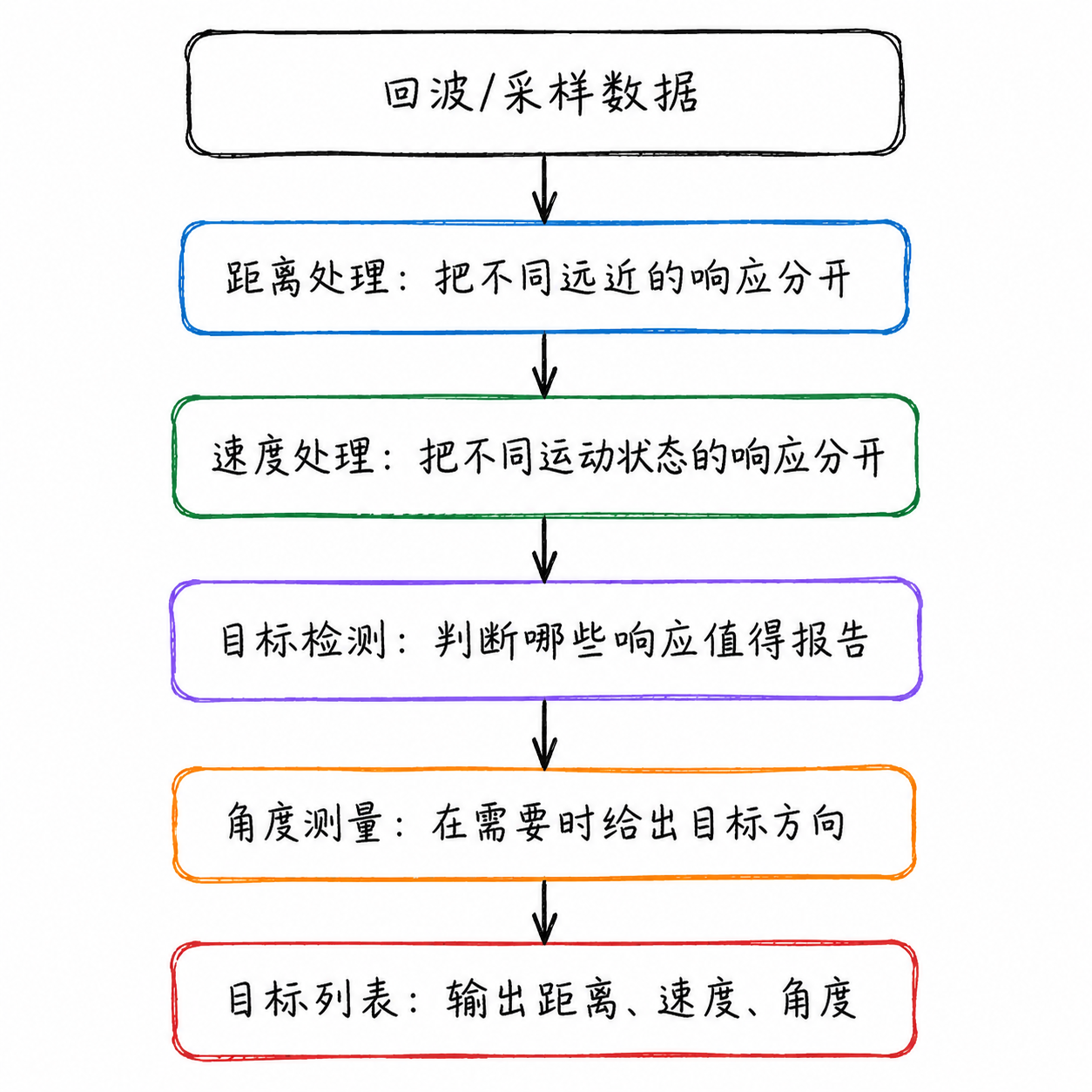
图1.2 展示了雷达的信号处理链路:雷达发出信号,接收回波,再把原始回波整理成距离、速度、检测和方向等结果。
电磁波与回波
人判断周围环境,常靠光和声音。眼睛接收外界反射来的光,耳朵接收传来的声音;黑夜里光不够,云雾里看不清,声音也会受距离和环境影响。雷达和这些感知方式有相似之处,只是多做了一步:它先发出电磁波,再接收目标反射回来的回波。
回声能帮助理解雷达测距。站在山前喊一声,过一会儿听到回声,说明声音先传到山体,再反射回耳朵。声音传播需要时间,回声来得越晚,声音走过的路程越长,山通常也越远。
雷达测距用的是同一个物理事实:信号传播需要时间,往返时间反映距离。只不过雷达把声波换成了传播速度更快的电磁波,把“喊一声”换成“发射一个脉冲”,把耳朵换成了接收机。
雷达用电磁波而不是声波,是因为电磁波更适合远距离探测。声波在空气中传播速度约 $340\,m/s$,探测 $10\,km$ 外的目标,往返时间接近一分钟;电磁波传播速度接近光速,同样距离的往返时间只有几十微秒。电磁波也不需要空气这类介质,可以在高空和太空环境中传播;合适频段的电磁波还能在黑夜、云雾等条件下工作。
不过,雷达和生活中的回声也不完全一样。电磁波传播得极快,往返时间往往非常短;目标反射回来的能量通常很弱;真实场景里还会混着地面、海面、雨滴、建筑物以及其他目标的响应。接收机拿到的是一段需要继续处理的电信号,不能像回声那样直接听出远近。
距离、速度与方向
先看距离。回声例子里已经有测距的影子:喊声传到山体,再反射回耳朵。声音往返用的时间越长,山通常越远。如果把声速记为 $v_s$,往返时间记为 $t$,距离就是
分母中的 $2$ 来自往返路程:声音走了“去山体”和“回耳朵”两段路。雷达测距把声波换成电磁波,把传播速度换成光速 $c$,于是写成
$R$ 是目标距离,$t$ 是从发射到接收回波的往返时间。回波到得越晚,目标通常越远。雷达测距最初的物理出发点,就是这个时间延迟。
除了距离,回波里还带着目标运动的信息。救护车从身边驶过时,声音音调会发生变化,这是多普勒现象。雷达里也有类似现象:目标沿雷达视线方向靠近或远离时,回波频率会相对发射频率产生轻微偏移。
目标靠近时,回波的波形被“压紧”了一点;目标远离时,回波的波形被“拉开”了一点。这个频率偏移量叫做多普勒频移 $f_d$。对单站雷达,径向速度和多普勒频移之间常写成
其中 $v$ 是目标沿雷达视线方向的速度,$\lambda$ 是发射电磁波的波长,$f_d$ 是回波相对发射信号的频率偏移。物理意义是:只要能稳定测出这个频率偏移,就可以反推出目标沿视线方向的速度。
时间延迟主要回答“目标有多远”,频率偏移主要回答“目标是不是在靠近或远离”。后面的雷达处理链,就是围绕这些信息逐步展开的。
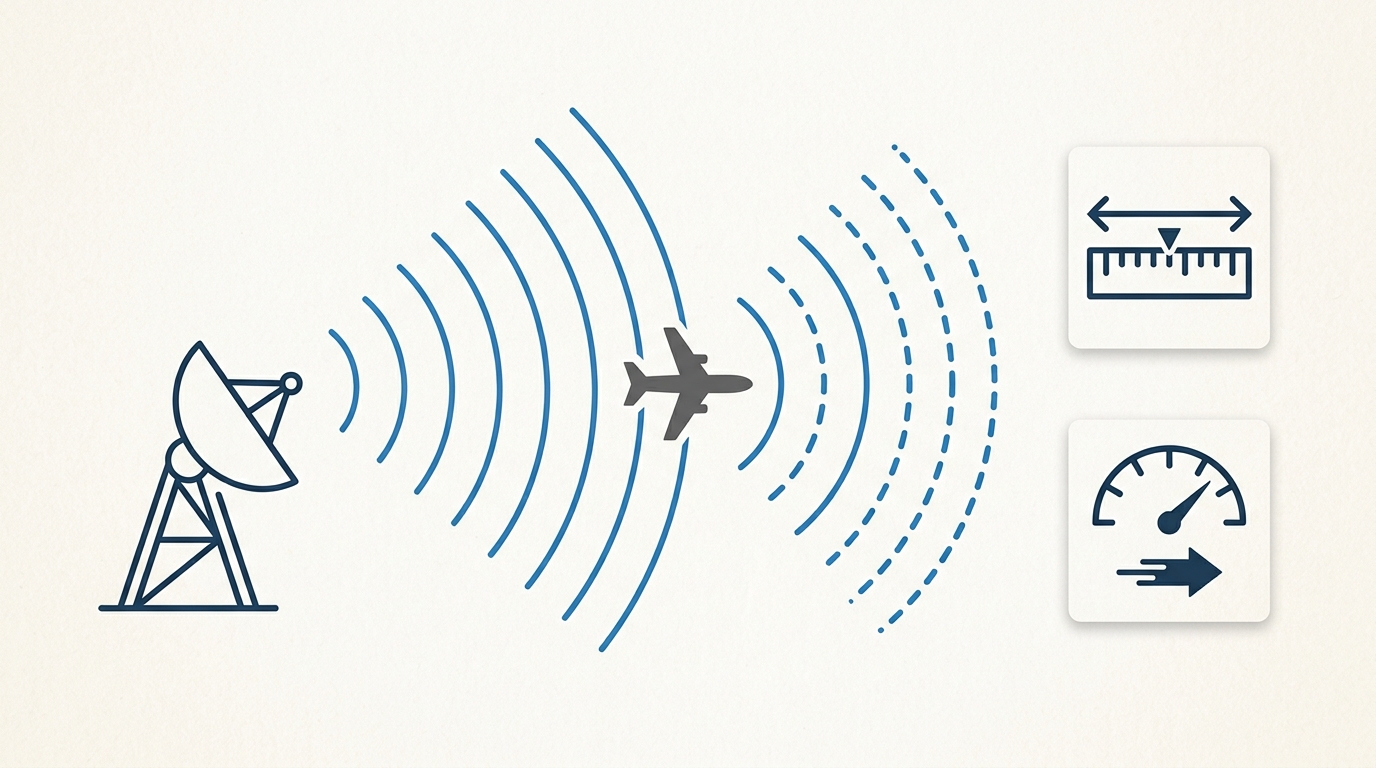
图1.3 把这两类信息放在同一张图里。左边是发射和接收,右边对应两类最早要从回波里提取的信息:往返时间差对应距离,回波频率变化对应速度。在实际数据中稳定测出这些量,还需要后续的信号处理方法。
雷达还常常需要知道目标来自哪个方向。只知道“目标在 100 m 外”还不够,工程上还要知道它在正前方、左前方,还是右侧。方向信息不只靠一个回波到达时间就能得到,往往还要依赖天线指向和波束扫描。
雷达最早面对的问题很直接:在黑夜、浓雾、云层或视线之外,怎样尽早发现远处的船只和飞机。
眼睛依赖光照和能见度,瞭望员看不到地平线以外的目标,声音探测又受距离和环境限制。无线电波能在较远距离传播,也能在目标上产生反射,这使“发出去,再等回波”成为一种可工程化的探测办法。
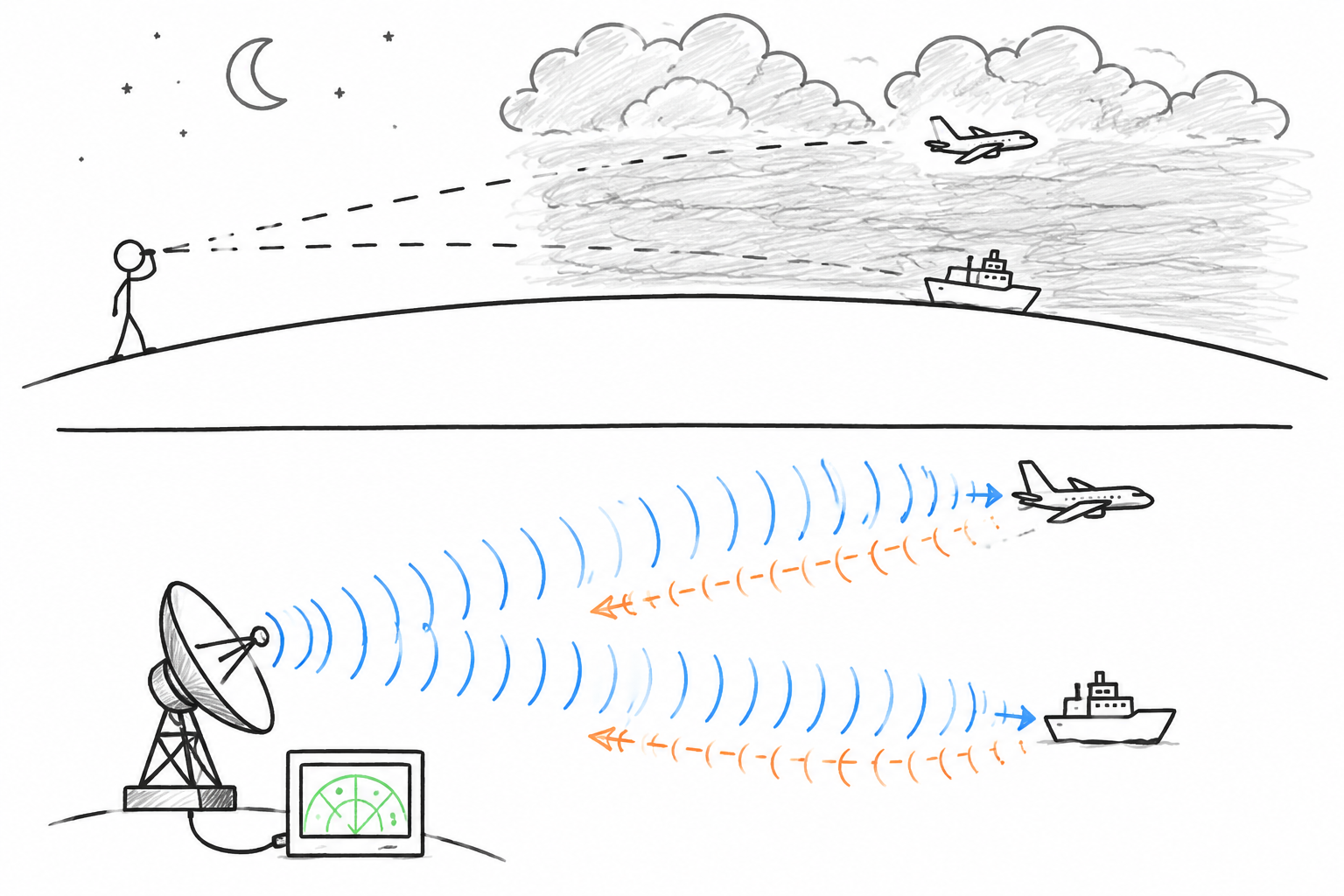
图1.4 用一个简单场景说明雷达起源里的核心困难:目标可能在黑夜、云雾或视线之外,但电磁波仍然可以发出去,并从目标上形成回波。
20世纪初,已经有人尝试利用无线电反射来发现金属目标。早期装置主要证明一件事:远处有大型金属物体时,接收端可以看到回波变化。它还不是今天意义上完整的雷达系统,通常也不能像现代雷达那样稳定给出距离、速度和方向,但它把问题打开了:目标不必发光,也不必主动发信号,只要能反射电磁波,就可能被发现。
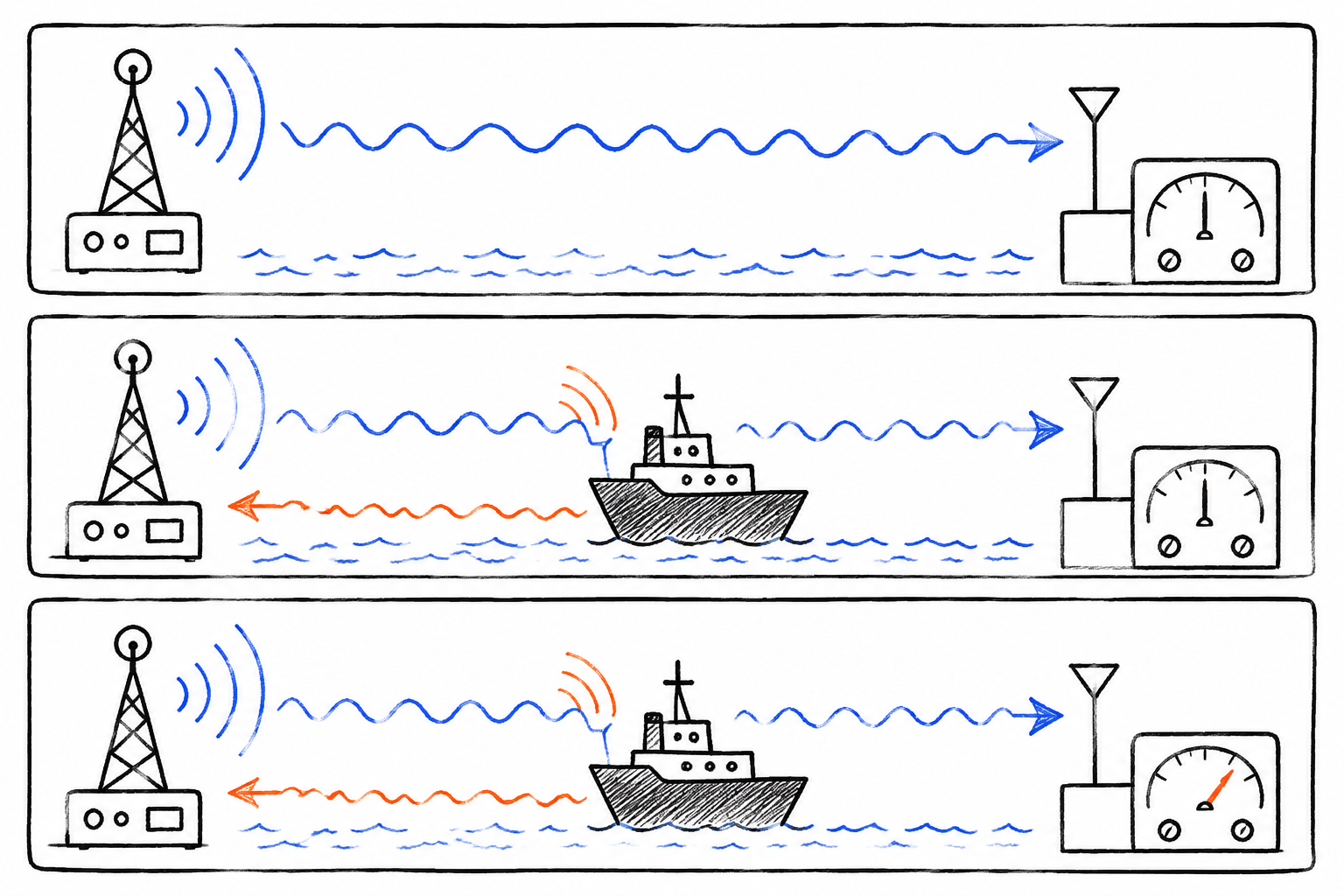
图1.5 把早期无线电回波实验画成三步:先发出无线电波,目标反射一部分能量,接收端出现变化。这个阶段先不追求完整测量,只确认一件事:目标能不能被回波看见。
到20世纪30年代,飞机速度越来越快,单靠目视、听音和地面观察已经来不及。雷达的价值也变得清楚:它可以提前发现远处目标,并把“发现目标”和“估计距离”连在一起。RADAR 这个名字里的 Detection 和 Ranging,正好保留了这个早期任务:先发现,再测距。
雷达系统发展
战争时期的雷达很快从单个实验装置变成系统工程。发射机、接收机、天线、显示器、操作员和指挥系统要配合起来,才能把一个微弱回波变成可用情报。
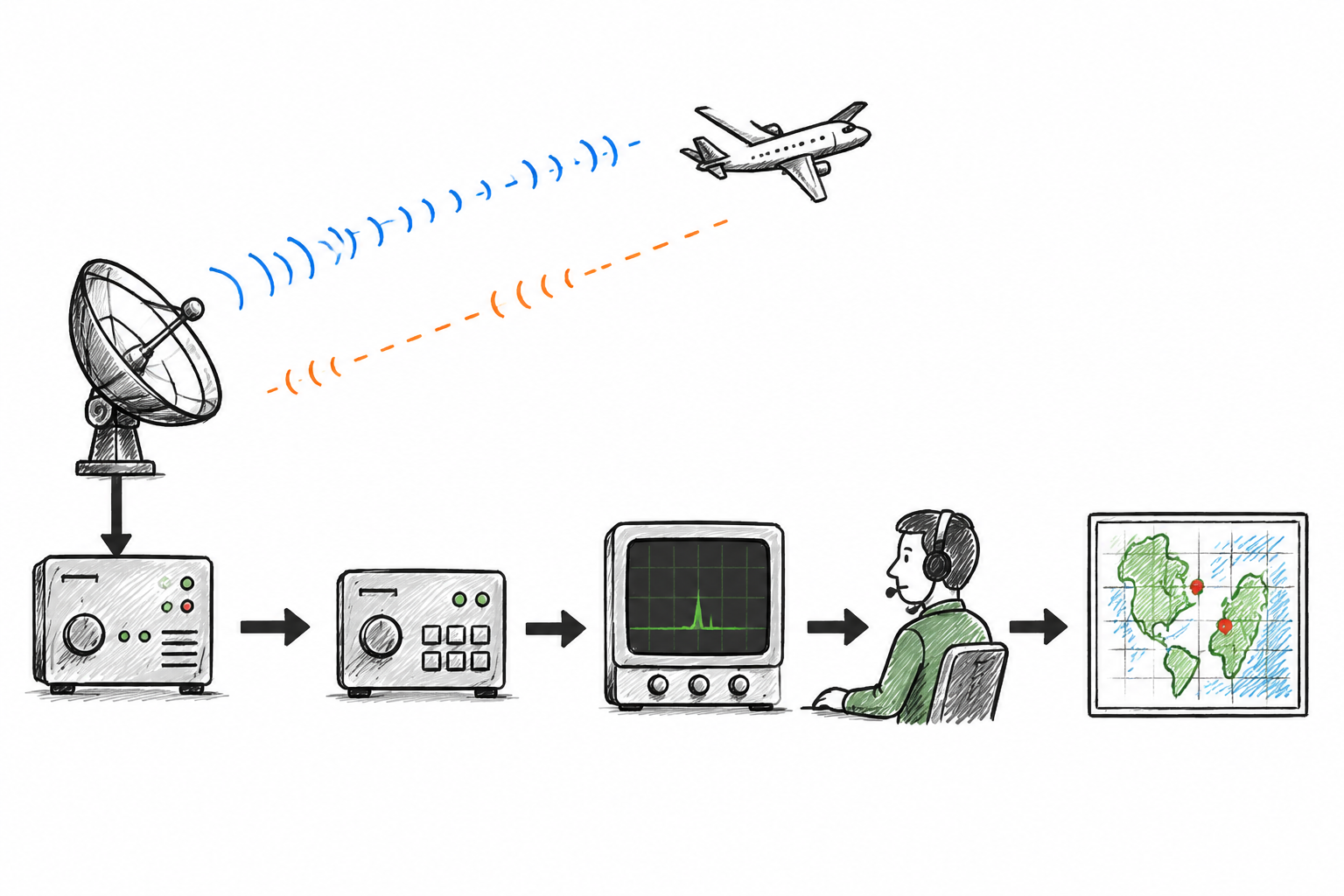
图1.6 展示的是系统化之后的雷达:天线、发射机、接收机、显示器、操作员和指挥图共同工作,弱回波才会变成可用信息。
战后,雷达走出防空预警,进入更多场景。机场用它维持空中交通秩序,船舶用它在夜间和雾中导航,气象系统用它观察降雨和风暴,交通测速雷达用它判断车辆速度,汽车毫米波雷达用它感知前车和障碍物。场景变了,基本动作仍然相似:发射电磁波,接收回波,从回波里提取信息。
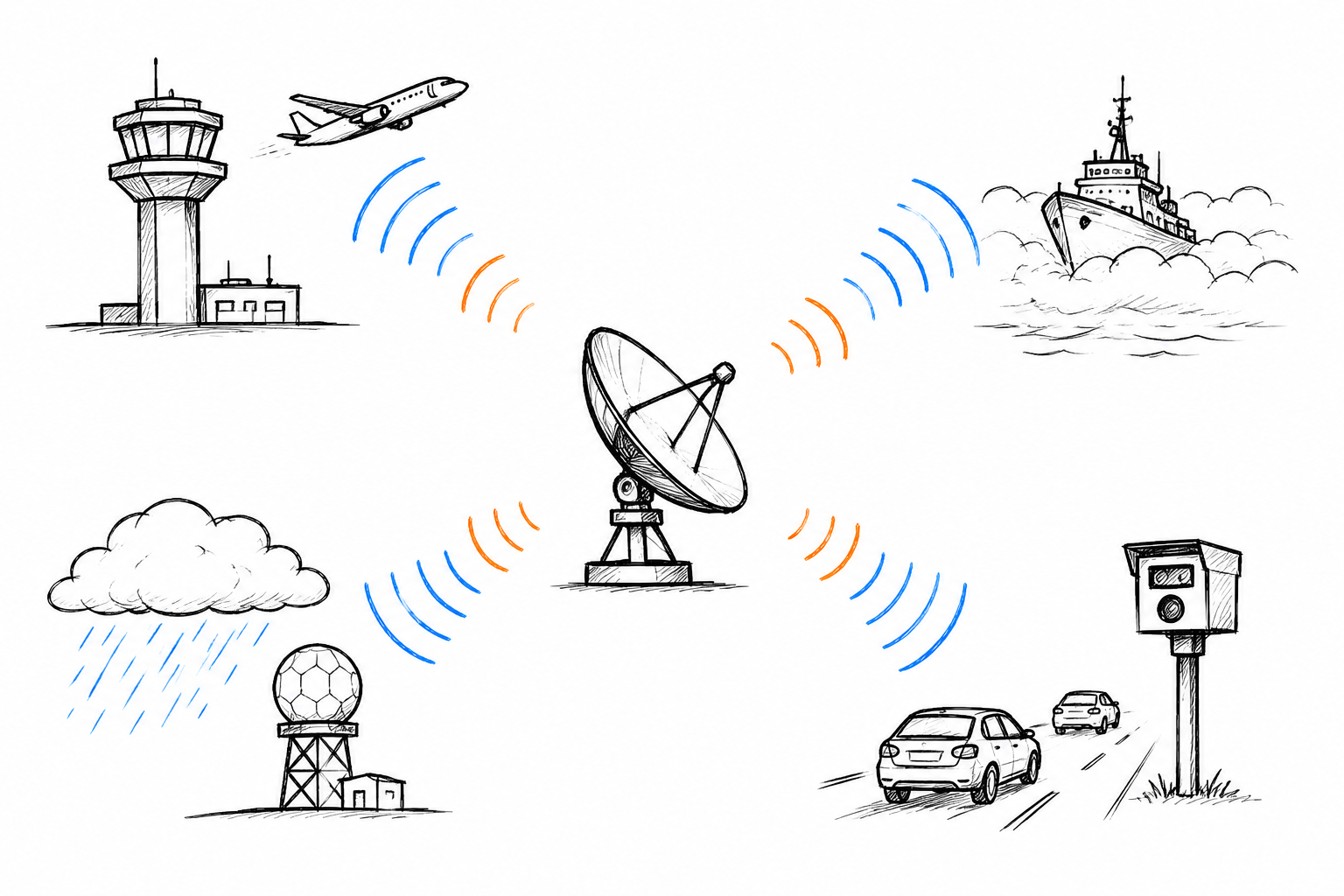
图1.7 把几类应用放在一起。空管、航海、气象和交通场景不同,但都围绕同一个基本动作展开:发射电磁波,接收回波,再整理成可用信息。
雷达的发展也让回波越来越复杂。带宽增大、波长变短后,雷达可以分辨更细的结构;天线和阵列技术发展后,方向信息变得更丰富;数字电路和计算能力提高后,更多处理可以放到数据里完成。现代雷达要做的事,也从“看见一个回波”扩展到把大量回波整理成图像、轨迹、检测结果和控制决策。
信号处理的必要性
在理想情况下,测量回波的延迟和频率,就能得到距离与速度。实际情况没有这么干净。
接收机拿到的通常是一段原始电信号,而不是已经写着“目标在 6 km、速度 30 m/s”的结果。目标远,回波能量很弱;场景里有多个目标时,不同目标的回波会叠在一起;地面、海面、建筑物、雨滴等也会反射电磁波,它们不一定是我们想报告的目标,却会出现在接收数据里。单看原始波形,很多时候只能看到一串起伏,很难指出哪一段对应哪个目标。
因此,雷达系统不能停在“收回波”这一步。它还要把原始回波一步一步整理成可以解释的结果:先沿时间方向区分不同延迟,从而把不同距离上的目标分开;再沿脉冲序列分析频率或相位变化,从而把不同速度上的目标分开;最后结合阈值判决,从噪声和杂波里挑出真正值得报告的目标响应。需要方向信息时,还要进一步利用天线指向和波束响应。
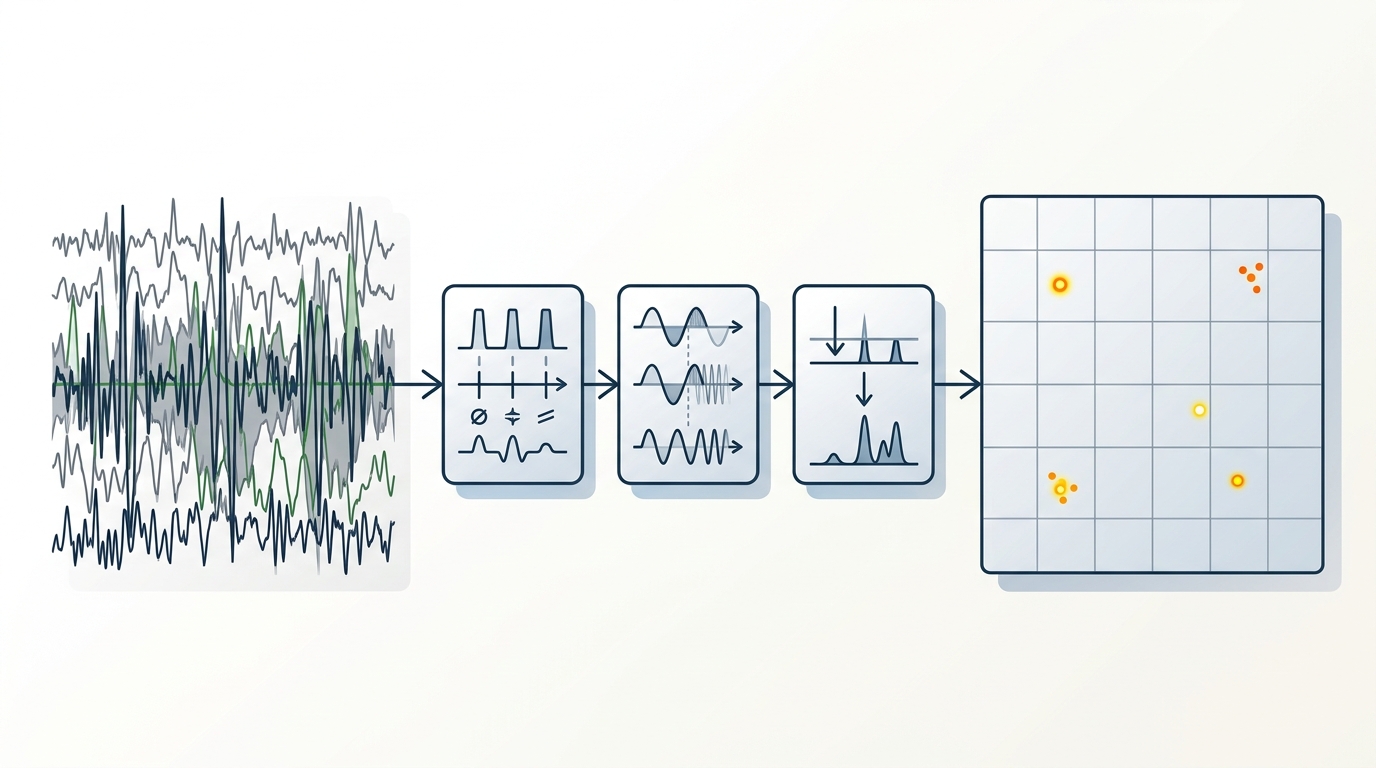
图1.8 展示的就是这个转变。左侧的原始回波混着目标、杂波和噪声,中间经过距离处理、速度处理和检测,右侧才变成可以解释的图和目标结果。信号处理要做的事,就是把“接收到的电信号”整理成“可以解释的目标信息”。
回波中的几类信息,需要从原始数据里一一提取出来。下表把这些线索和后续章节对应起来。
| 回波中的线索 | 回答的问题 | 本书中的位置 |
|---|---|---|
| 回波到达时间 | 目标有多远 | 第4章 距离测量 |
| 回波频率或相位变化 | 目标是否靠近或远离 | 第5章 速度测量 |
| 回波强弱与背景差异 | 这个响应能不能算目标 | 第6章 目标检测 |
| 天线方向或波束响应 | 目标来自哪个方向 | 第7章 角度测量 |
处理链路
本书后面会出现时域、频域、采样、匹配滤波、多普勒、CFAR、距离-速度图等概念。它们都服务于同一条链路:先有回波,再从回波里提取距离和速度,判断哪些响应算目标,需要时再补上方向信息。
第2章介绍信号基础,因为回波首先是一段信号;第3章说明雷达到底发什么、收什么,以及接收数据怎样组织;第4章在回波延迟上做距离测量;第5章在一串脉冲的变化中做速度测量;第6章讨论检测;第7章加入方向;第8章把这些步骤接成一条 MATLAB 处理流程。
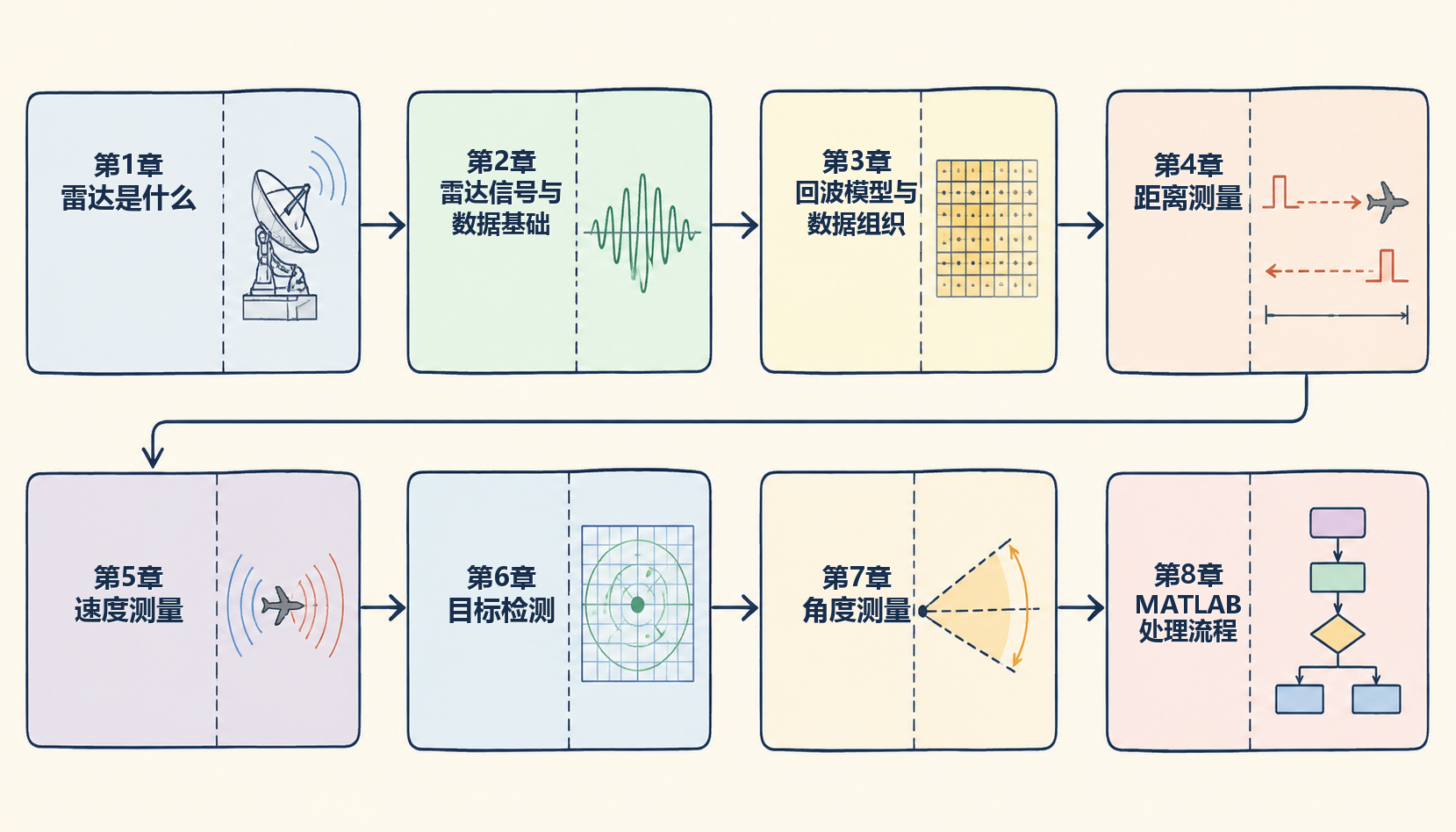
图1.9 是按章节整理出的路线图。前面几章先把信号和雷达回波说清楚,中间几章分别处理距离、速度、检测和角度,最后再收束到完整程序。本书正文以脉冲雷达为主线:发出一个或一串脉冲,接收回波,再从回波中整理出目标信息。