第3章 雷达信号的收发
3.1 发射信号与脉冲串
第2章把回波当成一段随时间起伏的信号来看:它有幅度,有频率,可以采样,也可以写成复数 I/Q。放到雷达系统里,这段信号不是凭空出现的。雷达先按一定节奏发射电磁波,电磁波碰到目标后散射回来,接收机再把返回的微弱电压采样成数据。
只看一次发射,接收机得到的是一条回波记录;连续发射很多次,这些回波记录就会一行一行排成矩阵。距离处理、速度处理和检测,都要从这张矩阵开始。
脉冲雷达的工作方式
想象你在一个黑暗的山洞里,想知道前方有没有墙壁。你拍一下手,然后屏住呼吸听回声。听到了,说明有墙;根据回声花了多久传回来,还能估算距离。声速大约 $340\,\text{m/s}$,如果回声在 $0.6\,\text{s}$ 后传回,那墙壁大约在
外。
脉冲雷达就是这个逻辑,只是把声波换成了电磁波,速度从 $340\,\text{m/s}$ 变成了光速 $3\times10^8\,\text{m/s}$。雷达天线先发出一段很短的电磁波脉冲,然后立刻停止发射,切换成接收状态,等待目标反射回来的回波。
把刚才山洞里的计算换成雷达符号,如果回波相对发射时刻延迟了 $\tau$,目标距离可以写成
分母中的 $2$ 仍然来自往返路程:电磁波先从雷达到目标,再从目标返回雷达。
脉冲宽度通常记为 $\tau_p$。如果 $\tau_p=1\,\mu\text{s}$,这段脉冲在空间中大约延展
约等于数百米的长度。脉冲延展会影响距离分辨率;对接收窗口来说,发射结束后,不同距离处的目标回波会在不同时间陆续返回。
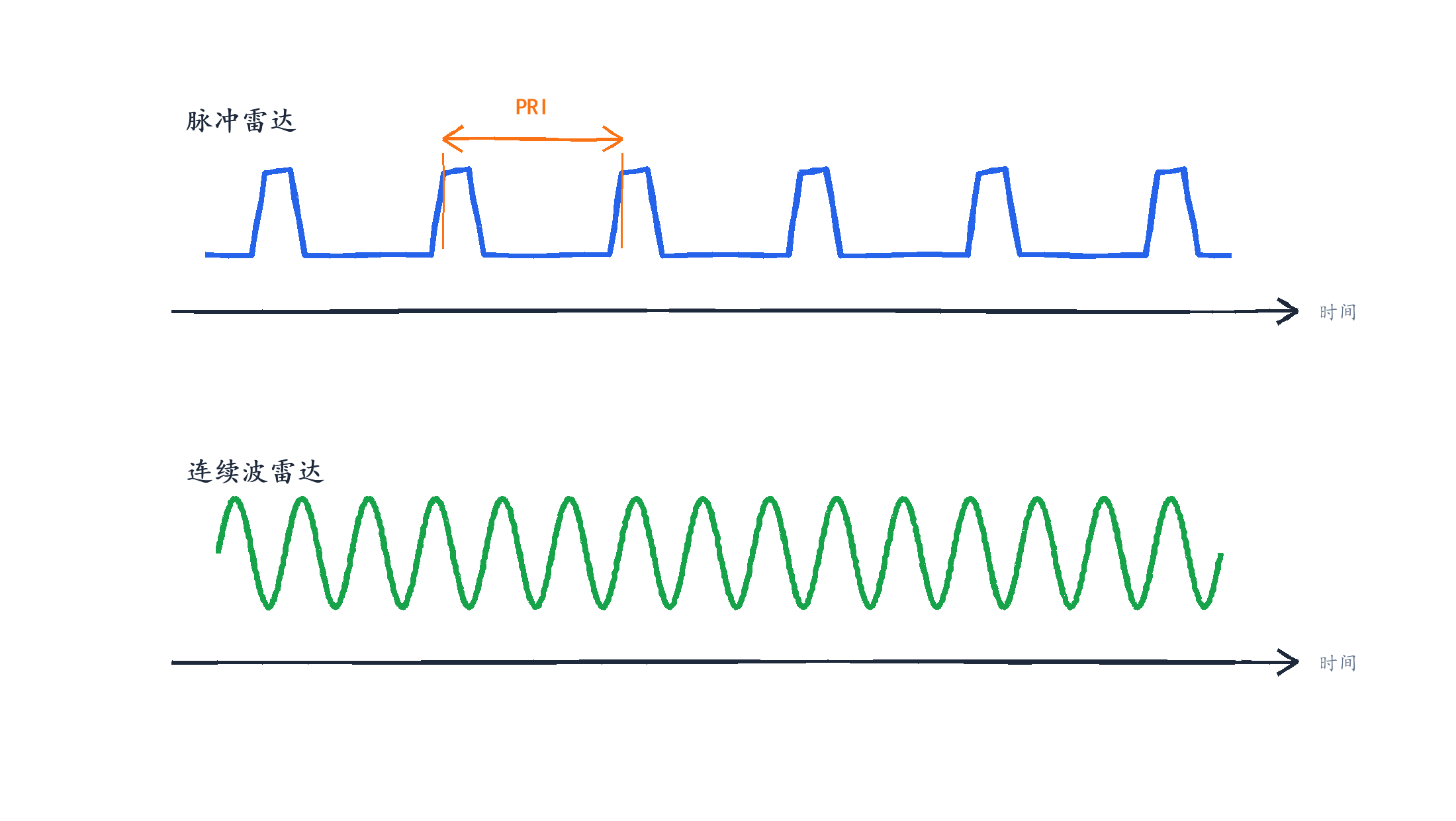
图3.1 的上半部分是脉冲雷达:短时间发射,剩余时间接收。下半部分是连续波雷达:一直发射,也一直接收。两种体制都能做雷达,但数据组织方式不同。
PRI、PRF 与占空比
脉冲雷达不会只发一个脉冲。它会隔一段时间发一次,形成有节奏的脉冲序列。相邻两个脉冲发射起点之间的时间间隔,叫脉冲重复间隔(Pulse Repetition Interval,PRI)。PRI 的倒数叫脉冲重复频率(Pulse Repetition Frequency,PRF):
例如 PRI 为 $1\,\text{ms}$ 时,PRF 就是 $1000\,\text{Hz}$,表示雷达每秒发射 1000 个脉冲。
PRI 限制最大不模糊距离。一个远距离目标的回波如果还没有回来,雷达就发出了下一个脉冲,接收机就可能分不清这个回波到底来自上一发脉冲,还是来自新脉冲后的近距离目标。为了避免这种混淆,目标回波的往返时间要小于 PRI:
因此最大不模糊距离近似为
PRI 为 $1\,\text{ms}$ 时,$R_{\max}=150\,\text{km}$。如果要看得更远,就要给远距离回波更多返回时间,也就是增大 PRI、降低 PRF。
另一个常用参数是占空比(Duty Cycle),表示发射时间在整个 PRI 中占多少:
如果脉冲宽度 $\tau_p=1\,\mu\text{s}$,PRI 为 $1\,\text{ms}$,占空比就是 $0.1\%$。这意味着雷达绝大多数时间在接收,只有很短时间在发射。平均功率不一定很高,但脉冲发射瞬间的峰值功率可能很大。
连续波雷达的工作方式
连续波雷达持续发射,同时接收回波,不再有“发一下、停下来听”的间隔。它天然适合测多普勒频移,因为发射信号一直存在,回波相对发射信号的频率偏移可以持续观测。测速枪就是很典型的连续波雷达例子。
连续波雷达测距比较困难,因为它没有清楚的“出发时刻”。调频连续波雷达(FMCW)通过让发射频率随时间变化,把距离信息转成差频或拍频来处理。汽车毫米波雷达里常见的很多公式,就来自这个体制。
脉冲雷达把“发出去、等回来、再处理”这条链路拆得最清楚。距离、速度和检测问题,都能沿着这条链路展开。FMCW 的拍频公式属于另一种距离信息组织方式,和脉冲雷达不是同一条数据链。
脉冲串与 CPI
单发脉冲能提供一个回波记录。它可以帮助测距离,但对速度和弱目标检测还不够。
速度信息常体现在多次回波之间的相位变化里。目标如果靠近雷达,每次脉冲返回时,相位会比上一次多转一点;目标如果远离,方向相反。只看一发脉冲,很难稳定判断这种跨脉冲变化。
弱目标也需要多次观测来积累证据。一次回波可能埋在噪声里,连续几十次或几百次回波放在一起,目标响应会更容易从背景中浮出来。
因此,雷达处理通常以一串脉冲为单位。这一串用于共同处理的脉冲,对应一个相干处理间隔(Coherent Processing Interval,CPI)。“相干”表示这些脉冲之间保持稳定的相位关系,跨脉冲比较才有意义。如果一个 CPI 中有 $N_p$ 个脉冲,PRI 为 $T_r$,那么这个 CPI 的持续时间大约是
这里把 CPI 理解为一段由多发脉冲构成的观测时间。第5章的速度处理会正式使用它。
3.2 目标反射与点目标模型
目标对电磁波的散射
雷达发出去的电磁波遇到飞机、舰船、雨滴、地面或建筑物后,会发生什么?
答案有点神奇:它不会简单地“全部弹回来”,也不会“全部穿过去”。真实情况更接近散射:目标表面不同位置把能量送向不同方向,只有一部分刚好回到雷达天线。
你想呀,朝山谷喊一声,山能给你回声;一只苍蝇当然也会散射一点点能量,只是微乎其微。要是苍蝇都能给出清楚回声,生活得有多乱呀。雷达看目标,本质上也在面对这种“谁能把能量送回来、送回来多少”的问题。
镜子反射可见光时,能量主要沿特定方向返回;飞机或舰船表面形状复杂,金属边缘、曲面、缝隙和涂层都会影响电磁波怎么散射。目标朝向变一下,雷达看到的回波强度也可能明显变化。
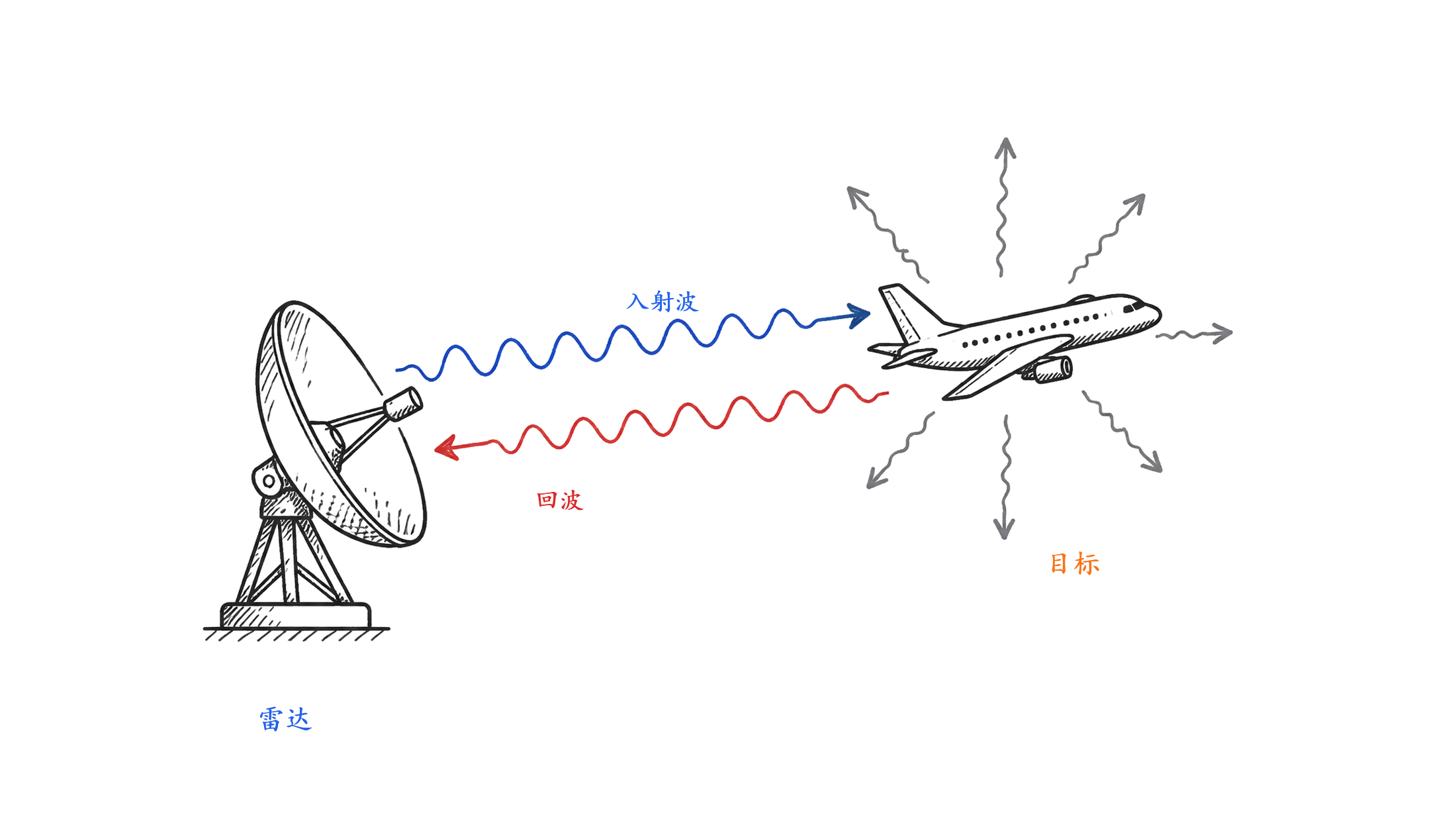
图3.2 中,入射波打到目标后向多个方向散射。雷达只接收沿回波方向返回的那一小部分能量。隐身外形和吸波材料的作用,也主要是减少朝雷达方向返回的能量。
我小时候就听说过隐形战斗机,以为飞机真的是肉眼见不到的。现在才知道,这里的“隐形”更多是对雷达来说的。
雷达截面积(RCS)
工程师需要一个数字描述“目标对雷达有多亮”。这个数字叫雷达截面积(Radar Cross Section,RCS),通常记为 $\sigma$,单位是平方米。
RCS 这个定义有点绕。它的单位是平方米,但千万别把它当成目标真的有这么大一块面积。它更像是在问:在雷达眼里,这个目标有多“亮”?如果某个理想目标能产生和真实目标一样强的回波,就用这个理想目标的等效面积来代表真实目标的散射能力。要是只能反射一半的能量,等效面积就相应变小;这个例子不严谨,但能帮助你先抓住“等效”两个字。RCS 越大,在同样距离和雷达参数下,接收回波通常越强。
一架飞机的物理尺寸可能很大,但如果外形和材料让大部分能量偏离雷达方向,它的 RCS 可以很小。一根细长金属杆的几何截面积很小,但在某些角度下也可能产生很强的反射。RCS 衡量的是“向雷达方向散射回来的能力”,不是目标占了多大地方。
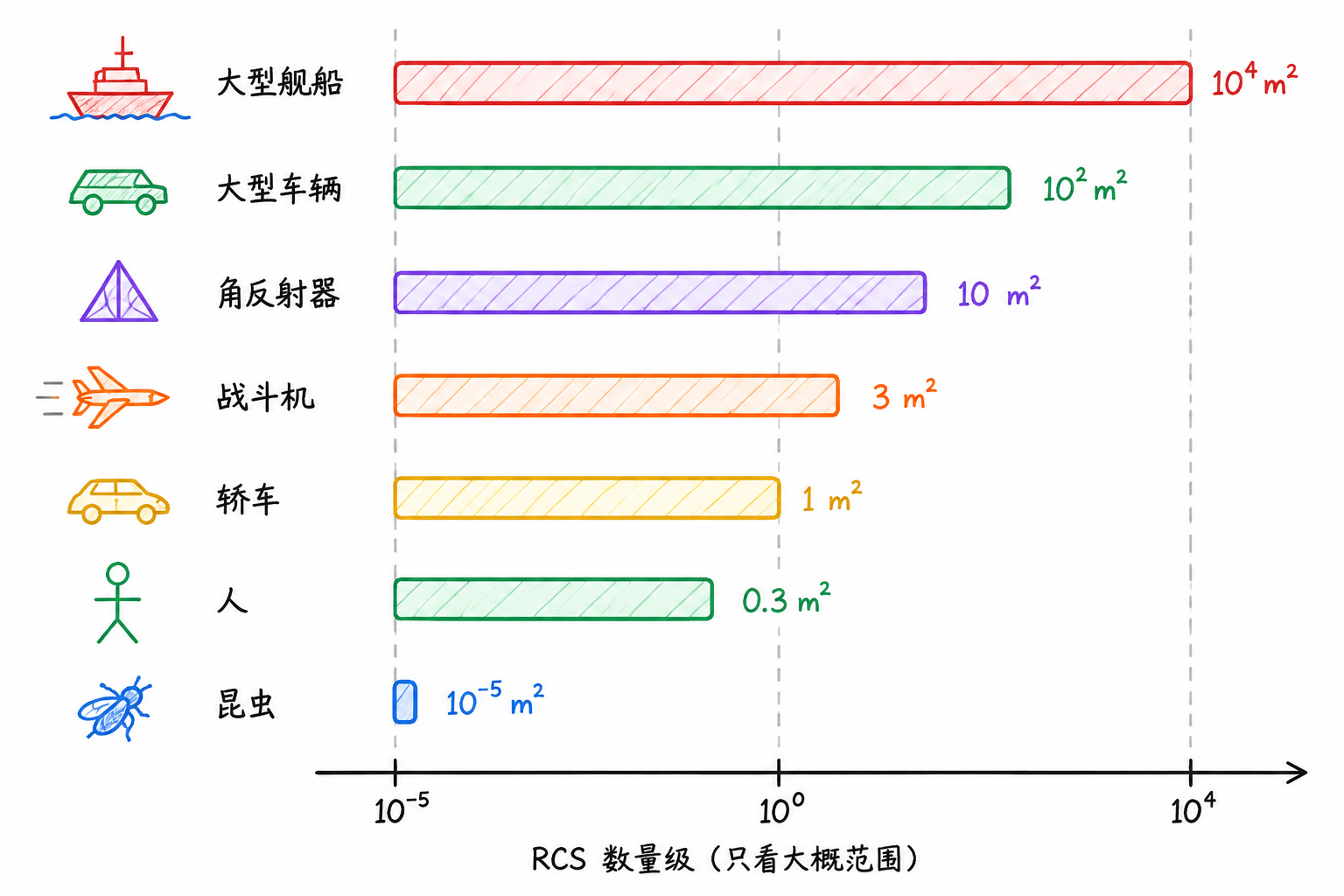
图3.3 使用对数坐标展示了不同目标 RCS 的数量级差异。从昆虫到大型舰船,RCS 可以跨越很多个数量级。这个差异会影响回波功率,也会影响后续检测难度。
RCS 还会随观察角度和频率变化。同一架飞机,正面对雷达和侧面对雷达,RCS 可能相差很多;同一个目标,在米波、厘米波、毫米波下呈现出的散射特性也可能不同。电磁散射细节在这里承担一个提醒:RCS 是工程估计量,不是一个永远固定的几何常数。工程计算要接受这种变化,再用测量、标定和余量设计去处理它。
点目标假设
真实目标有尺寸、有形状,也可能由多个散射点组成。飞机有机头、机翼、尾翼和发动机,舰船有桅杆、甲板和舷侧;这些部位的回波可能有不同延迟和相位。
真要把飞机的机头、机翼、发动机、边缘缝隙都算进去,这一章就变成电磁散射课了。我们先做一个很好用的简化:把目标看成点目标。点目标并不要求目标真的没有大小;它表示在当前雷达分辨能力下,可以把目标折叠成一个位置上的等效响应。
在本书的简化模型里,一个点目标主要由三个量描述:
| 量 | 决定什么 | 在回波中的表现 |
|---|---|---|
| 距离 $R$ | 往返传播时间 | 回波延迟 $\tau=2R/c$ |
| 径向速度 $v_r$ | 目标沿雷达视线方向运动 | 多普勒频移 $f_d=2v_r/\lambda$ |
| RCS $\sigma$ | 目标向雷达方向散射的能力 | 回波幅度大小 |
点目标假设让后续处理变得清楚:目标的形状先放一边,先用延迟找距离,用跨脉冲相位或频率变化找速度,再从背景中判断这个响应是否可信。等到做高分辨成像、复杂目标散射时,再把那些细节请回来。
3.3 距离衰减与雷达方程
在山谷里喊一声,近处石壁回声响,远处山峰回声轻。声波传播时,能量会随球面面积扩散,出现 $1/R^2$ 量级的衰减。雷达回波要走往返路径:先从雷达到目标,再从目标返回雷达,因此经历两次扩散,接收功率按 $1/R^4$ 衰减。目标距离翻倍,接收功率变成原来的 $1/16$。
这个四次方来自两段路。
去程的 $1/R^2$
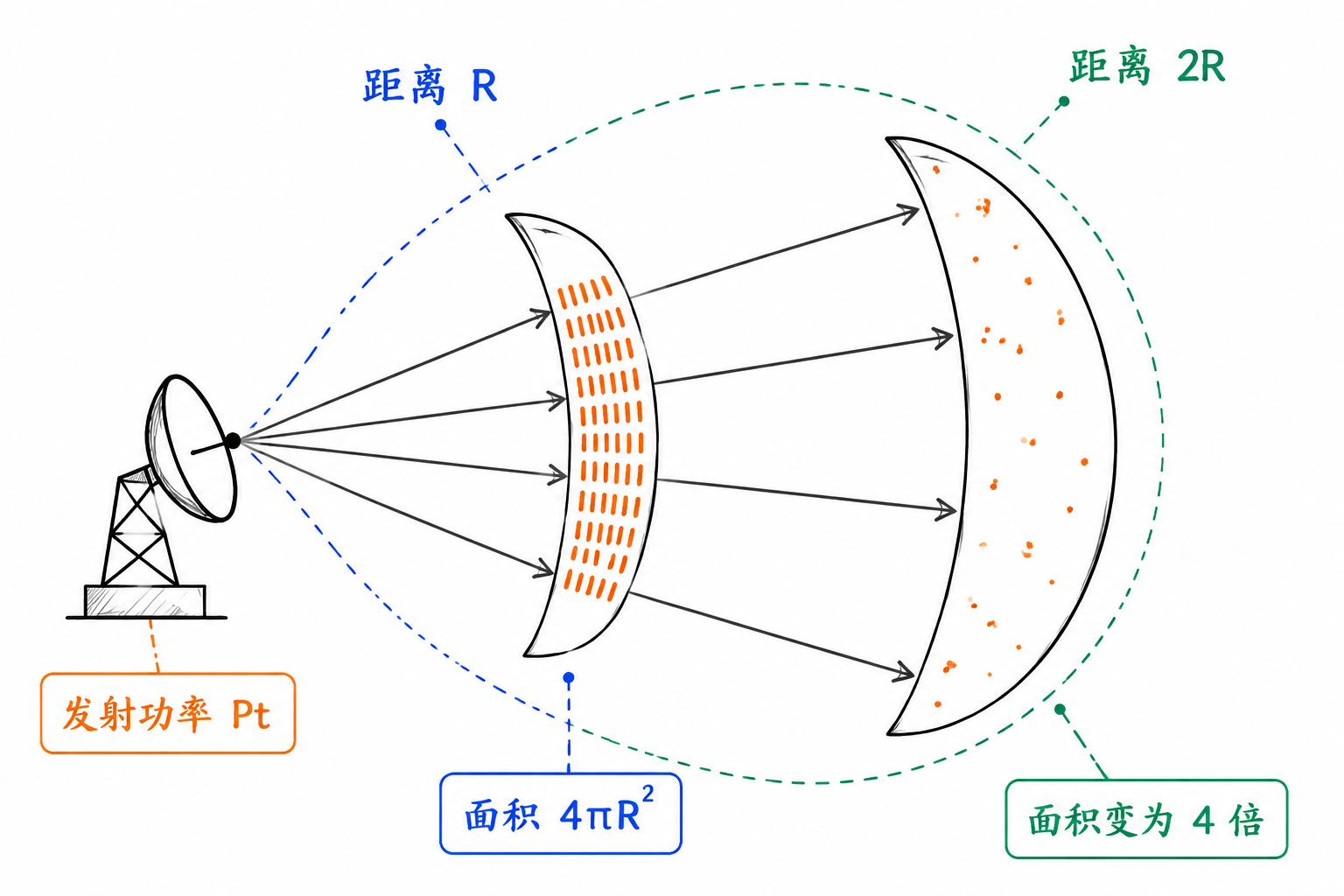
先看雷达发射出去的能量。假设发射功率为 $P_t$,先暂时把天线看成向各个方向均匀辐射。电磁波传播到距离 $R$ 处时,发射功率已经分布在半径为 $R$ 的球面上,球面面积为 $4\pi R^2$。
目标处的功率密度为
真实雷达天线有方向性,会把能量集中到某个方向。用天线增益 $G$ 表示这种集中能力后,主方向上的功率密度可以写成
这是第一次 $R^2$。它来自能量随球面面积扩散。
回程的 $1/R^2$
目标被功率密度 $S_1$ 照射后,会向雷达方向散射回一部分能量。RCS $\sigma$ 在雷达方程中承担的作用,是把真实目标复杂的散射过程等效成“在雷达方向能产生多少回波”。RCS 并不表示目标真的截获了一个几何面积为 $\sigma$ 的平板,它是按回波强度定义出来的等效量。
用这个等效量表示,雷达方向上的散射功率密度可以写成
分母中的 $4\pi R^2$ 表示回波返回雷达时再次随球面面积扩散。代入去程功率密度,得到
去程一个 $R^2$,回程一个 $R^2$,合起来就是 $R^4$。
接收功率公式
雷达接收天线不能把整个球面上的能量都收进来,只能收下有效孔径覆盖到的一小部分。接收天线的有效孔径记为 $A_e$,接收功率为
有效孔径和天线增益之间有关系
其中 $\lambda$ 是工作波长。代入后得到单站雷达常见的基础雷达方程:
如果发射和接收天线增益不同,也可以写成 $G_tG_r$ 的形式。本书多数简化例子默认收发共用同一天线,所以写成 $G^2$。
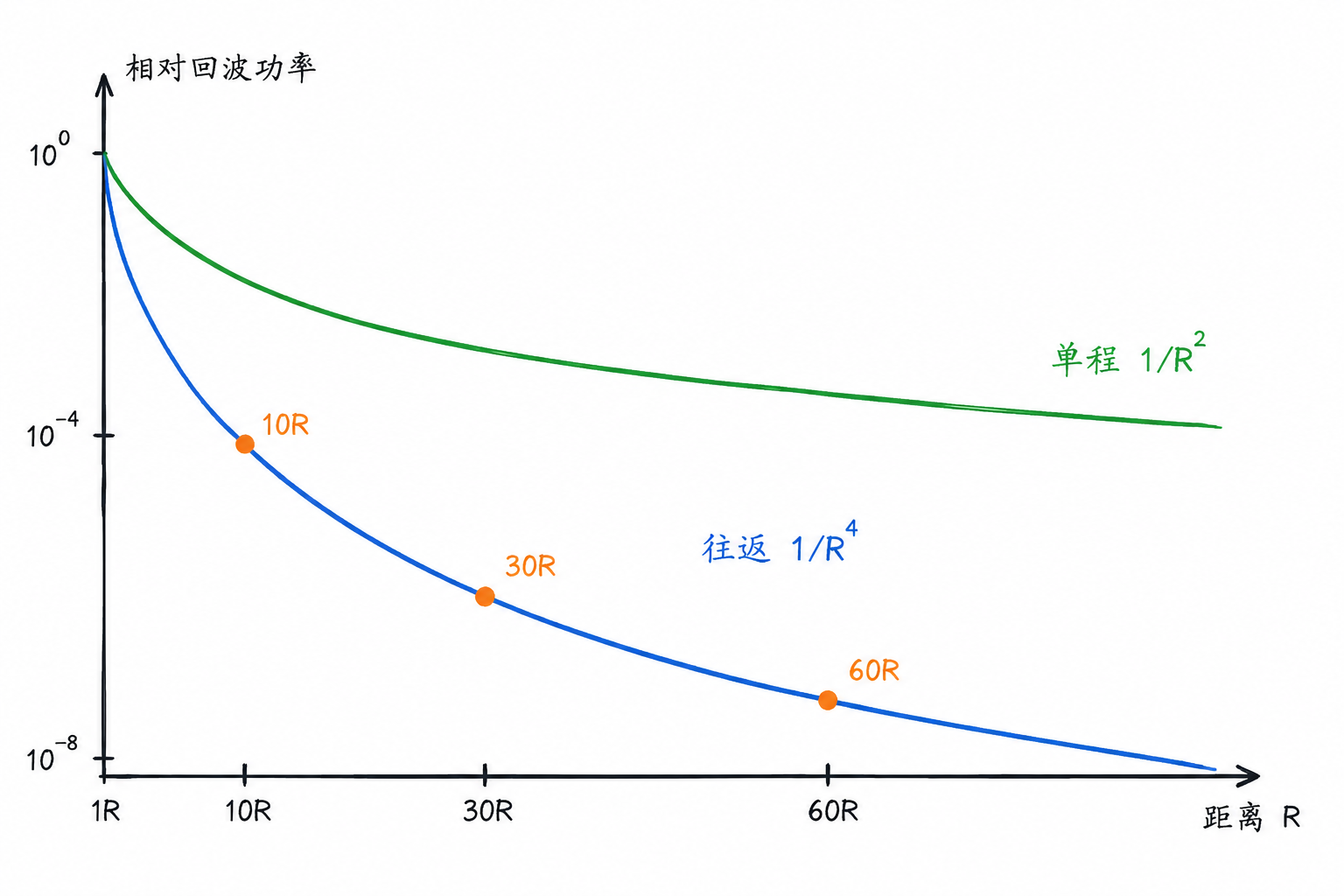
图3.5 同时画出了 $1/R^2$ 和 $1/R^4$。雷达回波要经历“去”和“回”两段扩散,下降速度比普通单程传播更快。距离从 $50\,\text{km}$ 增加到 $100\,\text{km}$,接收功率下降到 $1/16$;从 $100\,\text{km}$ 增加到 $200\,\text{km}$,又下降到 $1/16$。
雷达方程还给出了一些工程判断。发射功率 $P_t$ 增大,回波更强;天线增益 $G$ 增大,发射和接收都受益;目标 RCS $\sigma$ 越大,越容易被发现;距离 $R$ 是最难对抗的项,因为它在分母中是四次方。
现实系统还要考虑大气吸收、雨衰、馈线损耗、系统噪声、地面多径等额外因素。先抓住主结构就够了:远距离雷达难,不只难在目标远,更难在回波要走一个往返路径,功率衰减极快。
这篇文章把 $1/R^4$ 拆开了:雷达回波要走去程和回程两段路。
3.4 接收端信号模型
时间延迟、幅度衰减与多普勒
前面分别看了发射、散射和距离衰减。把它们合起来,一个点目标回波可以看成发射信号经过三类变化后的结果:晚到一点,变弱很多,频率或相位有轻微变化。
时间延迟由距离决定:
一个 $150\,\text{km}$ 外的目标,对应往返延迟
远距离目标的回波常常非常微弱,需要接收机放大和后续处理才能看见。
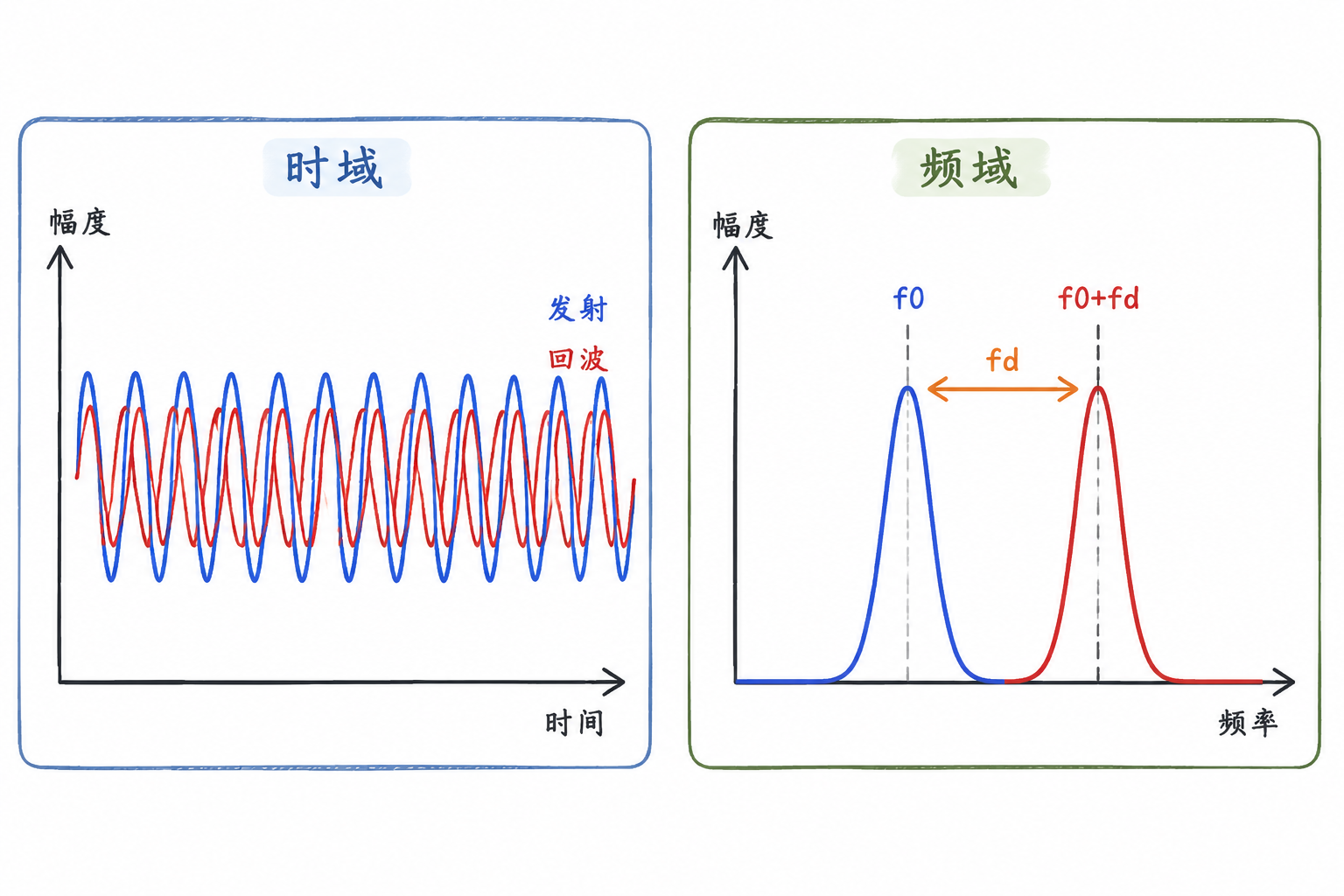
如果目标沿雷达视线方向运动,回波频率还会产生多普勒频移。单站雷达中常写成
其中 $v_r$ 是径向速度,即目标速度在雷达视线方向上的分量。这里约定靠近雷达为正,远离雷达为负。
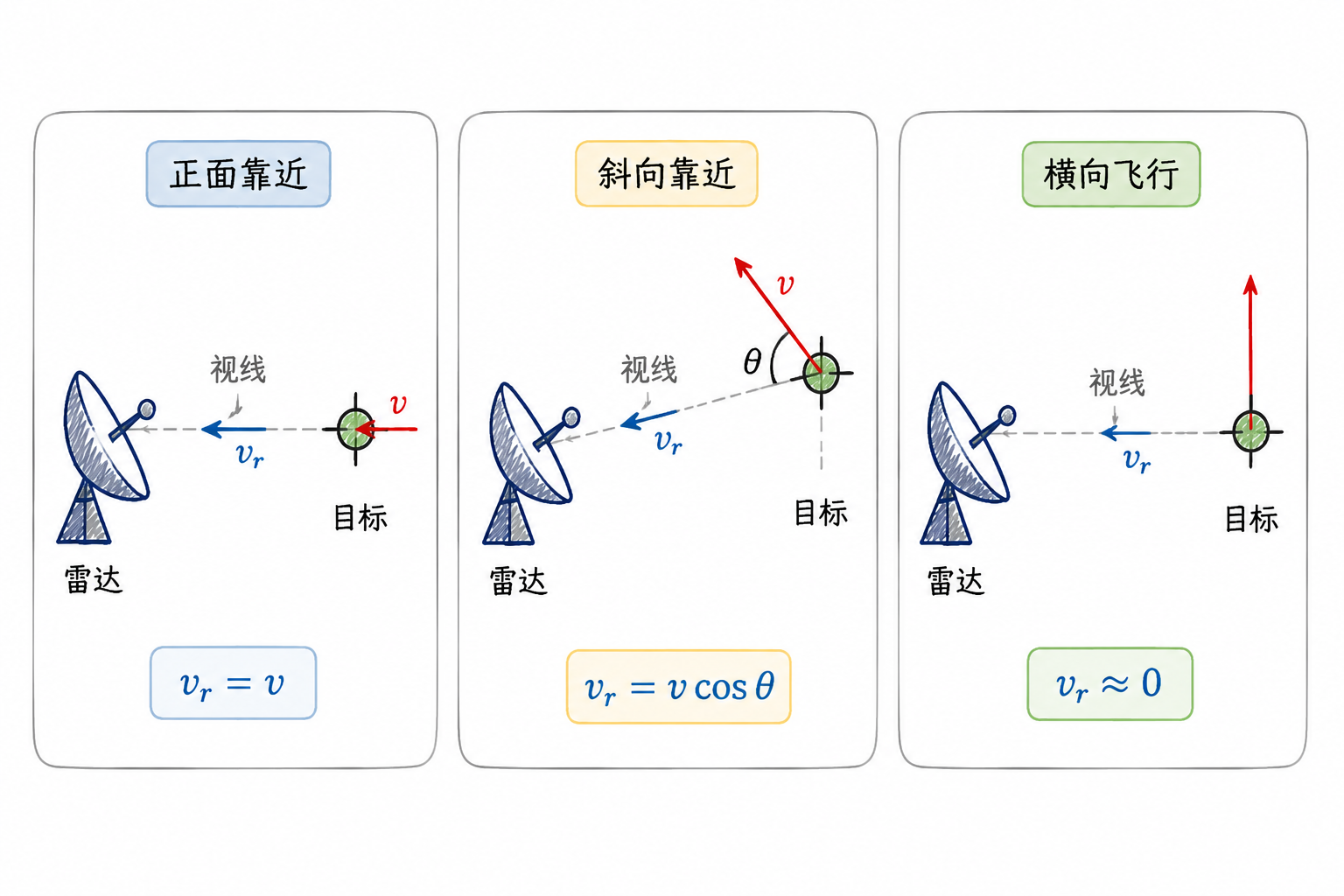
图3.6 展示了三个情况。目标正对雷达靠近时,径向速度等于目标速度,多普勒频移最大;斜向靠近时,只取速度在视线方向上的分量;横向飞过时,径向速度接近零,多普勒频移也接近零。雷达通过多普勒看到的是“靠近或远离”,不是目标的全部运动。
举一个数值。X 波段雷达工作波长约 $\lambda=3\,\text{cm}$,目标以 $100\,\text{m/s}$ 径向速度靠近,则
和 $10\,\text{GHz}$ 量级的载频相比,几千赫兹的偏移很小;但在频域或跨脉冲相位中,它是可以被稳定测出来的。
如果用复基带形式写,单个点目标的回波可以简化为
这里 $s(t)$ 是发射信号,$\tau$ 表示延迟,$\alpha$ 是包含传播衰减、RCS 和初始相位的复幅度,$f_d$ 表示多普勒频移,$w(t)$ 表示噪声。这个式子用于对齐前面几件事:距离进延迟,RCS 和距离衰减进幅度,速度进多普勒。
噪声、杂波与干扰
接收端不只收到目标回波。真实数据里还混着噪声、杂波和干扰。三者都让目标更难找,但来源不同。
| 成分 | 来源 | 对后续处理的影响 |
|---|---|---|
| 噪声 | 接收机热噪声、量化噪声等随机扰动 | 抬高背景底噪,降低 SNR |
| 杂波 | 地面、海面、雨滴、建筑物等环境回波 | 可能比目标更强,常集中在特定距离或多普勒区域 |
| 干扰 | 其他雷达、通信信号、发射泄漏或有意压制 | 可能出现强窄带、宽带或非稳定成分 |
噪声可以用功率来描述。接收机热噪声常写成
其中 $k$ 是玻尔兹曼常数,$T$ 是系统温度,$B$ 是接收带宽,$F$ 是噪声系数。带宽越宽,接收到的噪声通常越多。
杂波可以理解为环境产生的真实回波,来源通常不是当前关心的目标。地面、海面和雨滴都能反射电磁波。固定阈值和 CFAR 都必须面对这种背景变化。
干扰更像外部或系统内部闯进来的能量。它可能来自邻近雷达,也可能来自发射泄漏。把它和噪声、杂波分开即可:噪声是随机底噪,杂波是环境回波,干扰是外部或泄漏信号。
这篇文章把点目标回波写成了延迟、衰减和多普勒共同作用后的信号。
3.5 从 I/Q 样本到回波矩阵
从射频回波到 I/Q 样本
天线接收到的是很高频的模拟电压。例如 X 波段雷达的载频可能在 $10\,\text{GHz}$ 附近。电脑最后处理的是一串一串复数样本,不是这个 $10\,\text{GHz}$ 的高频波形。中间的接收机电路很复杂,但落到算法输入端,形态已经收束成一组 I/Q 数字样本。
接收机会把射频回波搬移到较低频率,或者搬到基带附近,再转换成 I/Q 两路数字样本。第2章已经见过,I/Q 可以合成复数样本
一个复数样本能同时保存幅度和相位。幅度会用于判断回波强弱,相位会用于后续速度处理。
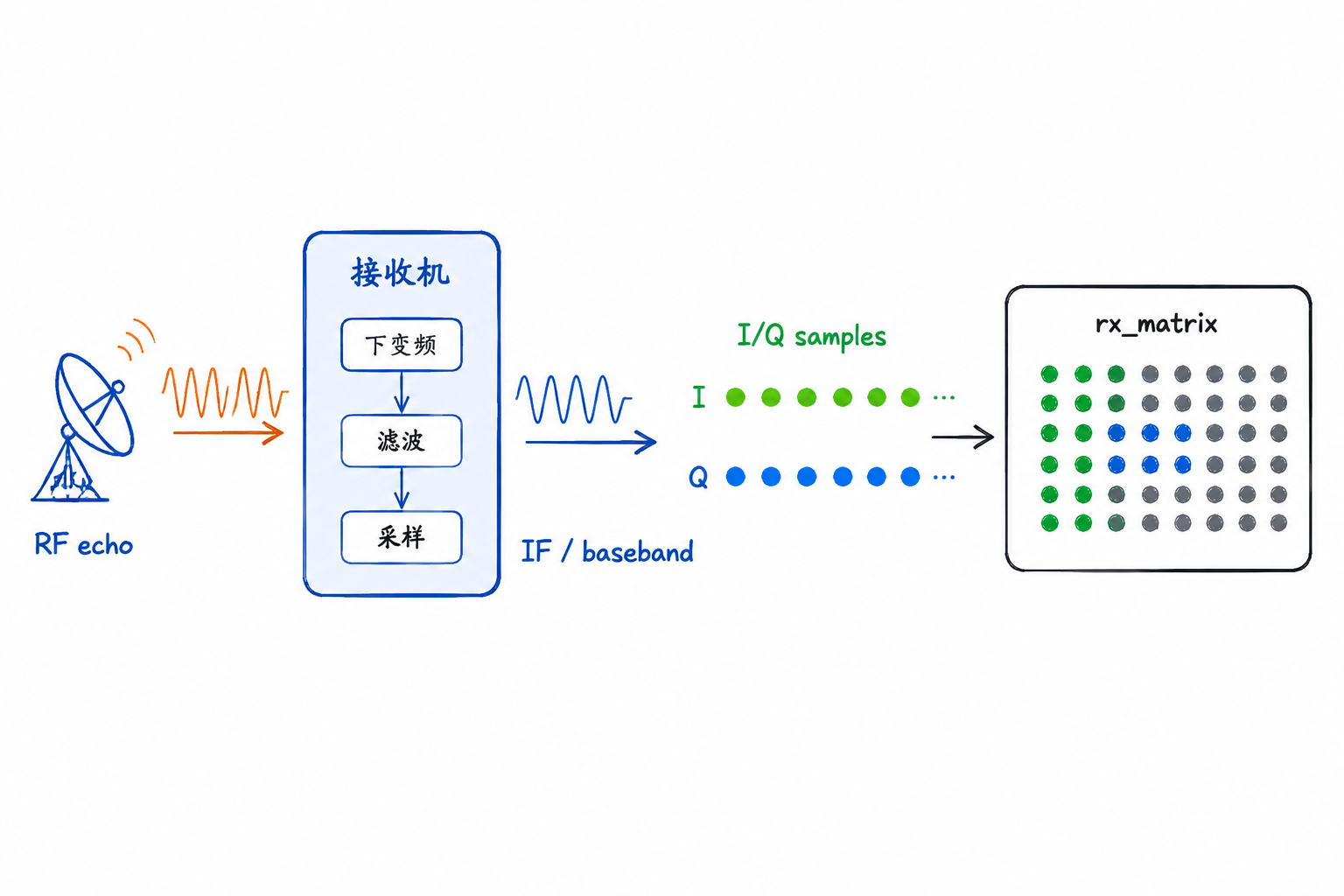
图3.8 画的是数据形态的变化:天线端是高频模拟回波,接收机把它搬到中频或基带附近,再采成 I、Q 两路数字样本。每一发脉冲得到一串复数 I/Q 样本,多发脉冲按发射顺序排起来,代码里通常记作 rx_matrix。
下表把这条数据形态的变化列出来。
| 到了哪一步 | 数据长什么样 | 在算法中的作用 |
|---|---|---|
| RF echo | 天线收到的高频模拟回波 | 电脑一般不直接处理它 |
| IF / baseband | 下变频后的中频或基带信号 | 保留回波的幅度和相位 |
| complex I/Q samples | 离散复数序列 $x[n]=I[n]+jQ[n]$ | 作为信号处理输入 |
rx_matrix | 多发脉冲的 I/Q 样本矩阵 | 距离和速度处理从这里开始 |
FMCW 资料中的 dechirp、beat frequency、range FFT,属于调频连续波雷达的数据组织方式。它们和本节的脉冲回波矩阵不属于同一条数据链,拍频公式不能套到这里。
一发脉冲对应一条快时间序列
雷达发射一个脉冲后,接收机会在一段时间内连续采样。假设采样率为 $f_s$,采样间隔为
用一组小数字熟悉 $\mathbf r_0$ 的写法。假设接收机以 $f_s=10\,\text{MHz}$ 采样,那么 $T_s=0.1\,\mu\text{s}$。如果一发脉冲后的接收窗口取前 8 个样本,就得到一条复数序列:
| 写法 | 读法 |
|---|---|
| $r_0[0]$ | 第 0 发脉冲里的第 0 个采样点 |
| $r_0[1]$ | 第 0 发脉冲里的第 1 个采样点 |
| $r_0[4]$ | 第 0 发脉冲里的第 4 个采样点 |
| $r_0[7]$ | 第 0 发脉冲里的第 7 个采样点 |
$r_0$ 的下标 $0$ 表示第 0 发脉冲,方括号里的 $n$ 表示这发脉冲内部的采样点编号。第 $n$ 个采样点如果要标出时间,就是
所以,一发脉冲内部有一条很短的采样时间轴。这个脉冲内的采样时间,通常叫快时间(fast time)。它变化得很快,常在纳秒到微秒量级。第4章会沿这条方向寻找回波延迟;在这里,先把 $\mathbf r_0$ 看成“一发脉冲采出来的一行复数样本”。
多发脉冲组成 rx_matrix
现在把上一小节的“一行数据”重复多次。仍用刚才的例子,如果一个 CPI 内发 4 个脉冲,每发都取 8 个采样点,那么第 0 发、第 1 发、第 2 发、第 3 发会得到四条序列:
把它们按发射顺序逐行排起来,就是一个 $4\times 8$ 的 rx_matrix:
| 脉冲/采样 | $n=0$ | $n=1$ | $n=2$ | $n=3$ | $n=4$ | $n=5$ | $n=6$ | $n=7$ |
|---|---|---|---|---|---|---|---|---|
| $m=0$ | $r_0[0]$ | $r_0[1]$ | $r_0[2]$ | $r_0[3]$ | $r_0[4]$ | $r_0[5]$ | $r_0[6]$ | $r_0[7]$ |
| $m=1$ | $r_1[0]$ | $r_1[1]$ | $r_1[2]$ | $r_1[3]$ | $r_1[4]$ | $r_1[5]$ | $r_1[6]$ | $r_1[7]$ |
| $m=2$ | $r_2[0]$ | $r_2[1]$ | $r_2[2]$ | $r_2[3]$ | $r_2[4]$ | $r_2[5]$ | $r_2[6]$ | $r_2[7]$ |
| $m=3$ | $r_3[0]$ | $r_3[1]$ | $r_3[2]$ | $r_3[3]$ | $r_3[4]$ | $r_3[5]$ | $r_3[6]$ | $r_3[7]$ |
例如 $r_2[4]$ 这个格子,表示“编号 $m=2$ 的脉冲里,索引 $n=4$ 的那个采样点”。横着看一行,是一发脉冲采出来的快时间序列;竖着看一列,是不同脉冲在同一个采样位置上的样本。
写成一般形式,一个 CPI 中有 $N_p$ 发脉冲,每发取 $N_s$ 个采样点,矩阵为
代码里可以把它叫做 rx_matrix。它的尺寸是
其中 $N_p$ 是脉冲数,$N_s$ 是每发脉冲内的采样点数。也就是说,行数等于脉冲数,列数等于每发脉冲的采样点数。
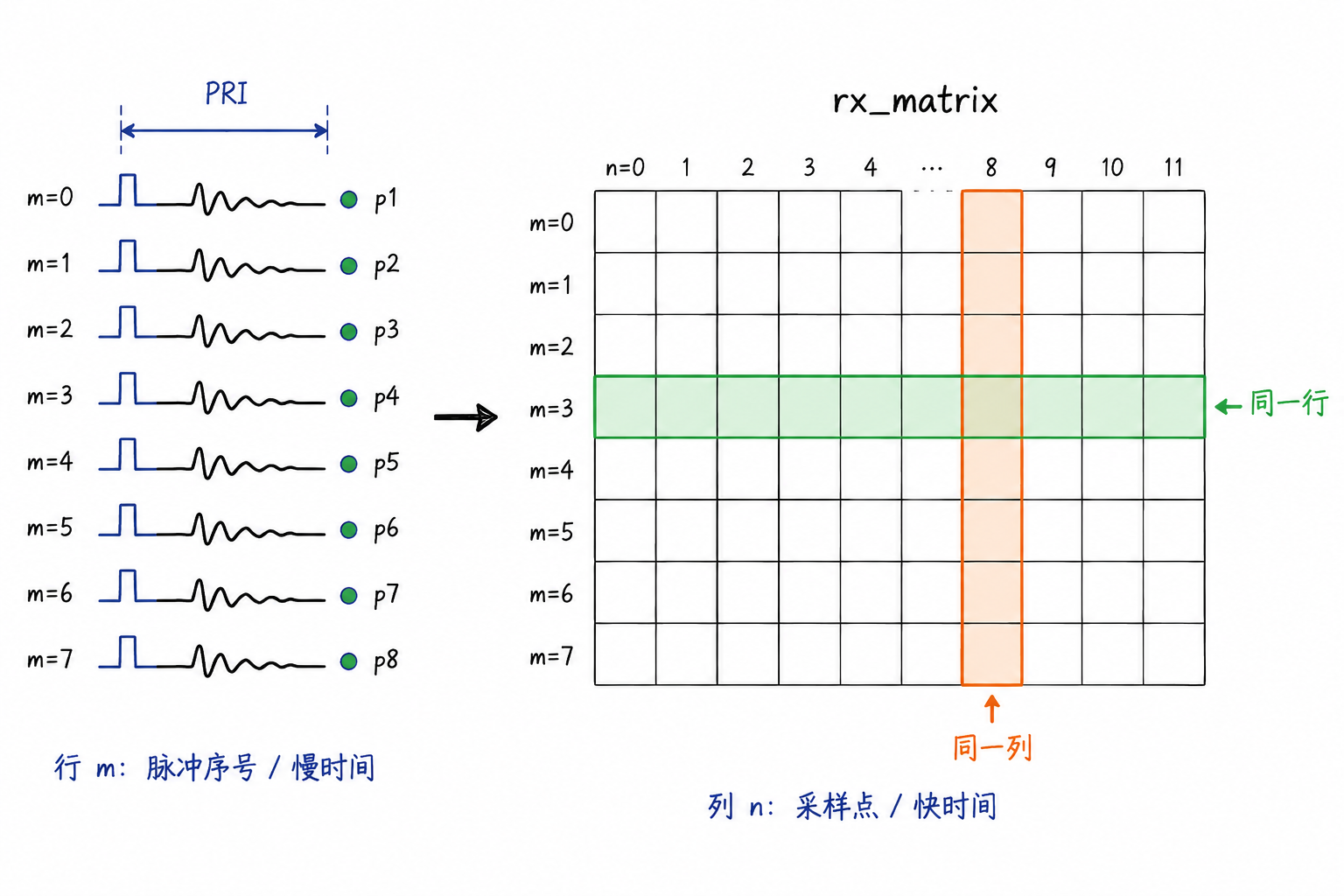
在图3.9 中,列方向是快时间:同一行中从左到右,列索引 $n$ 从小到大,对应从近到远的回波延迟。行方向是慢时间:行索引 $m$ 从上到下,对应第 $m$ 发脉冲。相邻两行之间隔着一个 PRI。
快时间用于找距离,慢时间用于比较多发脉冲之间的相位变化。一个静止目标如果一直处在同一个距离附近,它会在同一列附近反复出现;一个运动目标除了距离可能变化,它的复数相位也会在行与行之间逐步旋转。第4章沿列方向找延迟和距离,第5章沿行方向看相位变化和速度。
这篇文章把 rx_matrix 的行和列讲清楚了:列对应快时间,行对应慢时间。
3.6 小练习
练习 1:往返时间与距离
一部脉冲雷达接收到某目标回波,测得回波相对发射时刻延迟
(a)目标距离雷达多远?
(b)如果这部雷达的 PRI 为 $1\,\text{ms}$,最大不模糊距离是多少?这个目标是否超出最大不模糊距离?
解析: 目标距离由往返时间决定:
最大不模糊距离为
目标距离 $60\,\text{km}$,没有超过最大不模糊距离。
练习 2:PRI、PRF 与占空比
某雷达的 PRI 为 $2\,\text{ms}$,脉冲宽度为 $2\,\mu\text{s}$。
(a)PRF 是多少?
(b)占空比是多少?
(c)如果平均发射功率为 $1\,\text{kW}$,峰值功率大约是多少?
解析: PRF 为
占空比为
平均功率和峰值功率近似满足
因此
脉冲雷达平均功率看起来不高,但发射瞬间的峰值功率可能很大。
练习 3:距离衰减的量级感
两个目标的 RCS 相同,其他条件也相同。目标 A 距离雷达 $50\,\text{km}$,目标 B 距离雷达 $100\,\text{km}$。
(a)目标 B 的接收功率是目标 A 的几分之几?
(b)如果目标 A 的 SNR 是 $30\,\text{dB}$,目标 B 的 SNR 大约是多少?
解析: 接收功率与 $1/R^4$ 成正比。目标 B 距离是目标 A 的 2 倍,所以接收功率变为
功率下降 $1/16$ 对应 dB 变化为
如果噪声功率不变,SNR 也下降约 $12\,\text{dB}$,从 $30\,\text{dB}$ 变为约 $18\,\text{dB}$。
练习 4:多普勒频移计算
一部 S 波段雷达工作波长为 $\lambda=0.1\,\text{m}$,目标以径向速度 $v_r=200\,\text{m/s}$ 靠近雷达。
(a)多普勒频移 $f_d$ 是多少?
(b)如果目标以相同速度横向飞过,径向速度近似为 0,多普勒频移会怎样?
解析: 靠近时
如果目标横向飞过,径向速度接近 0,则
这说明多普勒频移只反映目标沿雷达视线方向的运动。
练习 5:rx_matrix 的尺寸
某雷达在一个 CPI 中发射 $64$ 个脉冲。每发脉冲后的接收窗口采样 $1024$ 个复数 I/Q 点。
(a)rx_matrix 的尺寸是多少?
(b)哪一个维度对应快时间?哪一个维度对应慢时间?
(c)第4章距离处理主要沿哪个方向展开?第5章速度处理主要沿哪个方向展开?
解析: 每发脉冲得到一条长度为 $1024$ 的快时间序列,一共有 $64$ 发脉冲。因此矩阵尺寸为
行方向对应脉冲编号,也就是慢时间;列方向对应脉冲内采样点,也就是快时间。
第4章距离处理主要沿列方向寻找回波延迟;第5章速度处理主要沿行方向比较多发脉冲之间的相位变化。