Chapter 1: What is Radar
1.1 What is Radar
When you check the weather forecast, you often see a colorful precipitation echo map. It comes from weather radar: the radar transmits electromagnetic waves into the sky and converts the echoes reflected by clouds and raindrops into images.
The slowly rotating surveillance antenna beside airports, speed detection equipment at highway intersections, and millimeter-wave modules in car front bumpers all do similar things: actively emit electromagnetic waves, receive echoes reflected back from targets, and determine from these echoes what's ahead, where it is, and whether it's moving.
RADAR stands for Radio Detection And Ranging. This name preserves radar's original purpose: using radio waves to detect targets and estimate their distance. Later, radar capabilities expanded to measure velocity and direction, and to participate in imaging and recognition. But all these capabilities are built on the same foundation: first emit electromagnetic waves, then extract information from the echoes.
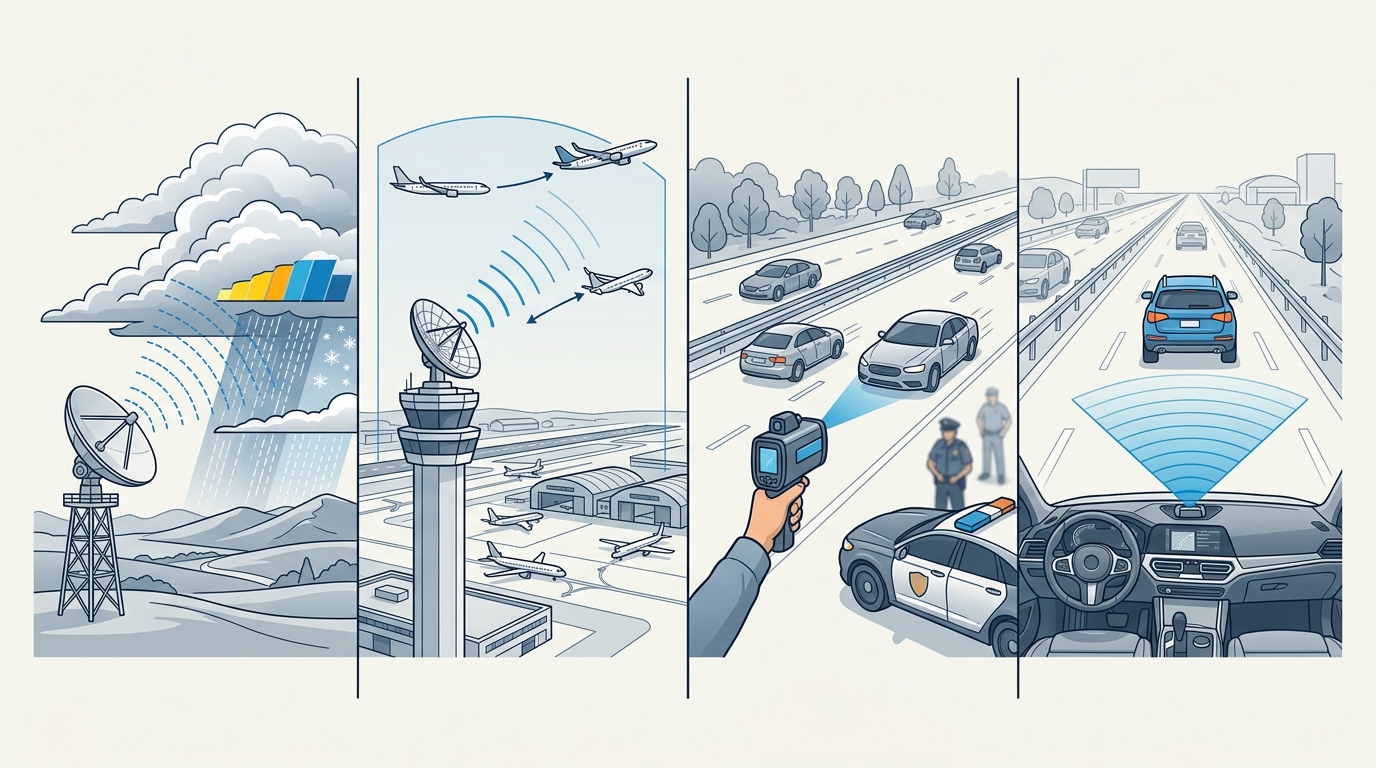
Figure 1.1 groups several common radar types together. Weather radar tracks cloud and precipitation position changes, airport surveillance radar monitors aircraft bearing and distance, highway speed radar determines whether vehicles are approaching or receding, and automotive millimeter-wave radar senses the distance and relative velocity of vehicles ahead. Though application scenarios differ, all rely on echoes for information.
The questions radar needs to answer can be summarized as four: is there something in the distance, how far is it from the radar, is it moving, and what direction is it coming from. Radar signal processing is the step-by-step organization of echoes into answers to these questions.
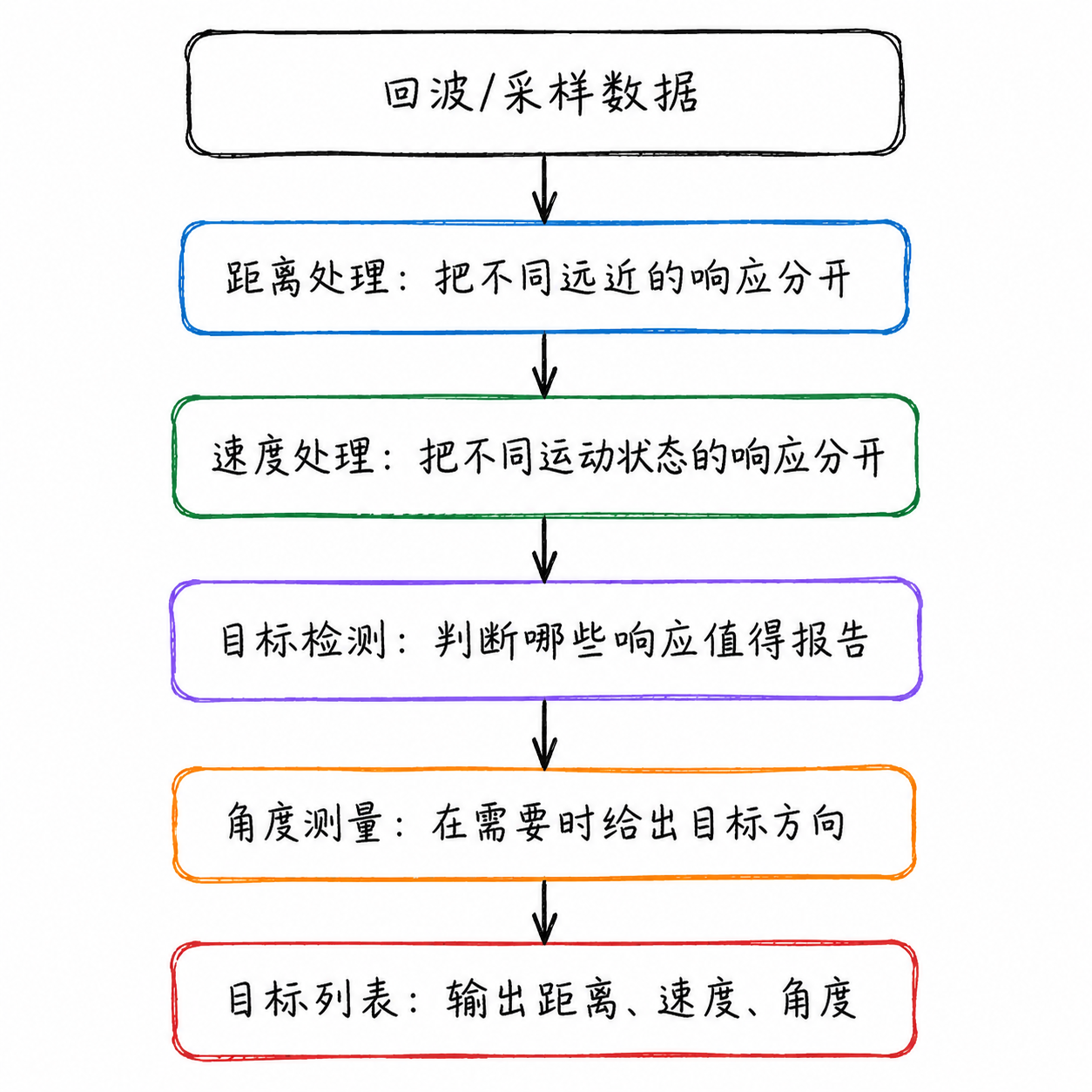
Figure 1.2 shows the radar signal processing chain: the radar transmits a signal, receives echoes, and then organizes the raw echoes into results for range, velocity, detection, and direction.
Electromagnetic Waves and Echoes
People judge their surroundings mainly through light and sound. Eyes receive light reflected from the outside world, ears receive incoming sounds. In the dark when light is insufficient, or in clouds and fog when visibility is poor, sound is also affected by distance and environment. Radar has similarities to these sensing methods, but adds one more step: it first emits electromagnetic waves, then receives the echoes reflected back from targets.
Echoes help understand radar ranging. Standing in front of a mountain and shouting, you hear an echo after a while, indicating the sound first traveled to the mountain, then reflected back to your ears. Sound propagation takes time; the later the echo arrives, the longer the path the sound traveled, and usually the farther away the mountain is.
Radar ranging uses the same physical fact: signal propagation takes time, and round-trip time reflects distance. Radar simply replaces sound waves with electromagnetic waves that propagate much faster, replaces "shouting" with "transmitting a pulse," and replaces ears with a receiver.
Radar uses electromagnetic waves rather than sound waves because electromagnetic waves are better suited for long-distance detection. Sound waves propagate at about $340\,m/s$ in air; detecting a target $10\,km$ away would take nearly a minute for the round trip. Electromagnetic waves propagate near the speed of light, so the same distance round trip takes only tens of microseconds. Electromagnetic waves also don't require a medium like air, so they can propagate in high-altitude and space environments. Electromagnetic waves at appropriate frequencies can also work in darkness, clouds, fog, and other conditions.
However, radar isn't exactly like everyday echoes. Electromagnetic waves propagate extremely fast, so round-trip times are often very short. Energy reflected back from targets is usually very weak. Real scenarios also mix responses from the ground, sea surface, raindrops, buildings, and other targets. What the receiver gets is an electrical signal that needs further processing, unlike an echo you can directly hear to judge distance.
Range, Velocity, and Direction
First, consider range. The echo example already contains the essence of ranging: the shout travels to the mountain and reflects back to the ears. The longer the round-trip time, usually the farther the mountain. If we denote sound speed as $v_s$ and round-trip time as $t$, the distance is
The $2$ in the denominator comes from the round-trip path: the sound travels both "to the mountain" and "back to the ears." Radar ranging replaces sound waves with electromagnetic waves and propagation speed with the speed of light $c$, giving
$R$ is the target range, $t$ is the round-trip time from transmission to receiving the echo. The later the echo arrives, usually the farther the target. The original physical basis of radar ranging is this time delay.
Besides range, echoes also carry information about target motion. When an ambulance passes by, the pitch of its siren changes—this is the Doppler effect. A similar phenomenon occurs in radar: when a target approaches or recedes along the radar line of sight, the echo frequency shifts slightly relative to the transmitted frequency.
When the target approaches, the echo waveform is "compressed" slightly; when the target recedes, the echo waveform is "stretched" slightly. This frequency offset is called the Doppler shift $f_d$. For monostatic radar, the relationship between radial velocity and Doppler shift is often written as
where $v$ is the target velocity along the radar line of sight, $\lambda$ is the wavelength of the transmitted electromagnetic wave, and $f_d$ is the frequency offset of the echo relative to the transmitted signal. The physical meaning is: as long as this frequency offset can be reliably measured, the target velocity along the line of sight can be inferred.
Time delay primarily answers "how far is the target," while frequency offset primarily answers "is the target approaching or receding." The subsequent radar processing chain unfolds around this information.
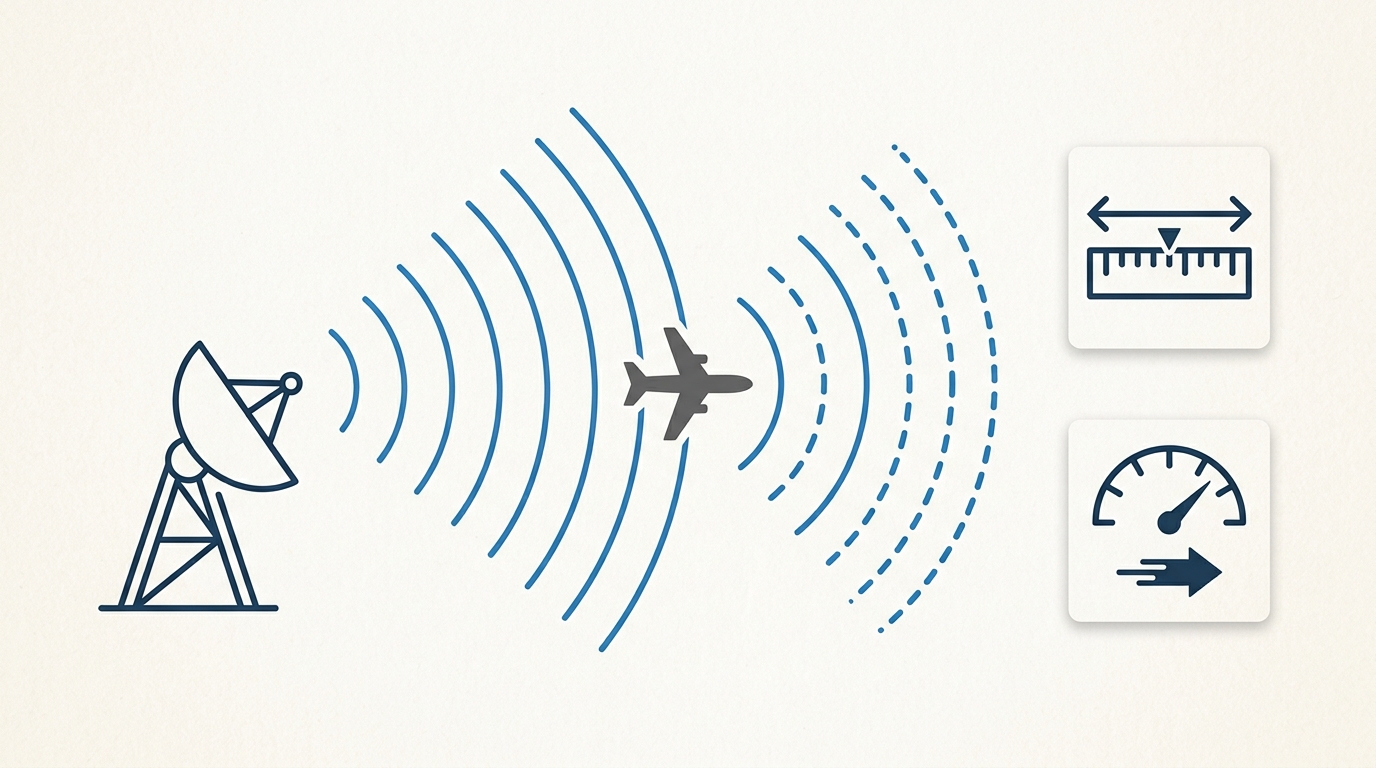
Figure 1.3 places these two types of information in the same diagram. The left side shows transmission and reception, the right side corresponds to the two earliest types of information to extract from echoes: round-trip time difference corresponds to range, echo frequency change corresponds to velocity. Reliably measuring these quantities in actual data still requires subsequent signal processing methods.
Radar also often needs to know what direction the target is coming from. Just knowing "the target is 100 m away" isn't enough; engineering also requires knowing whether it's straight ahead, front left, or to the right. Direction information can't be obtained from just one echo arrival time; it often depends on antenna pointing and beam scanning.
The earliest problem radar faced was very direct: in darkness, dense fog, clouds, or beyond the line of sight, how to detect distant ships and aircraft as early as possible.
Eyes depend on lighting and visibility; lookouts can't see targets beyond the horizon; sound detection is limited by distance and environment. Radio waves can propagate over considerable distances and can produce reflections from targets, making "transmit and wait for echoes" an engineerable detection method.
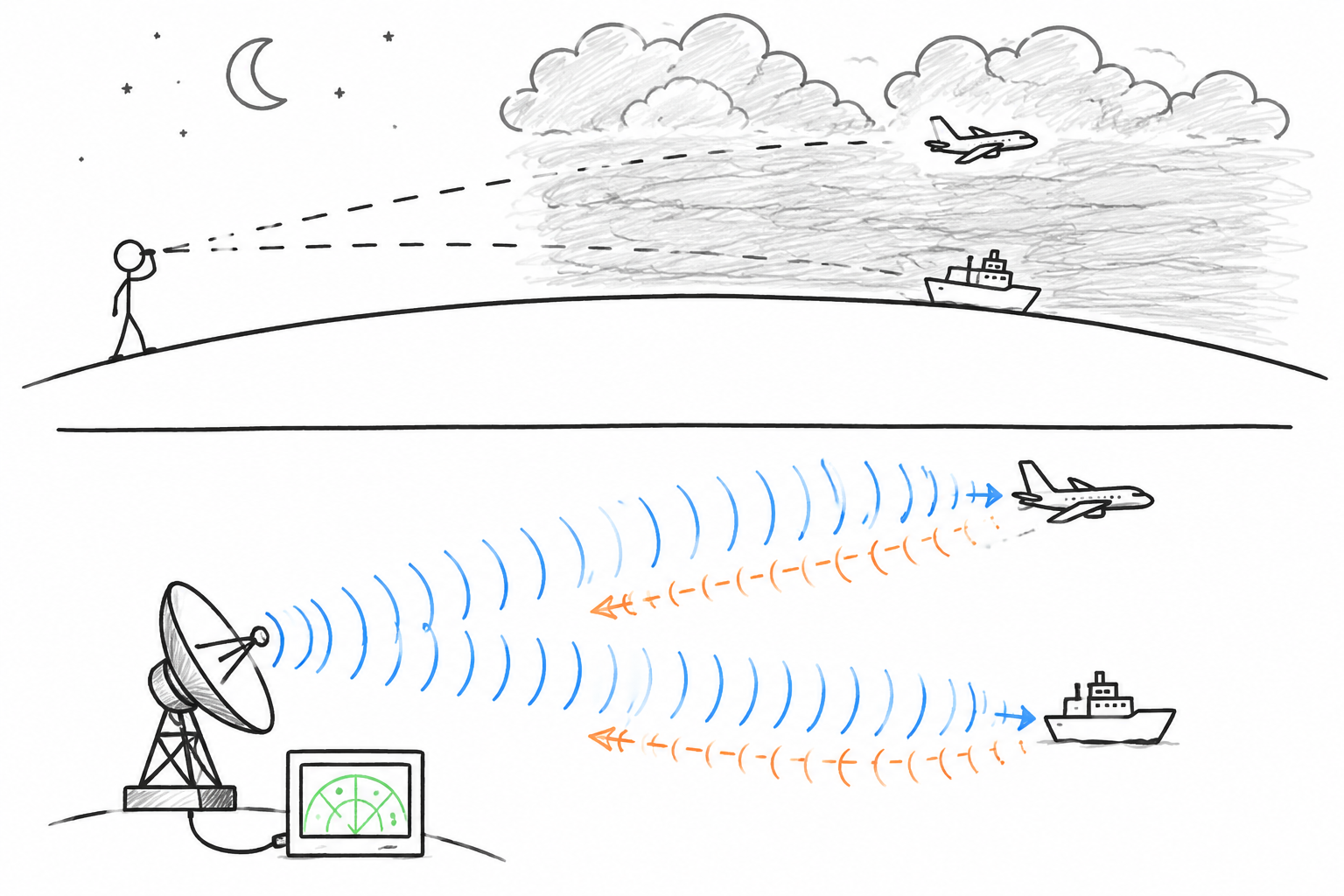
Figure 1.4 uses a simple scenario to illustrate the core difficulty in radar's origin: targets may be in darkness, clouds, fog, or beyond line of sight, but electromagnetic waves can still be transmitted and form echoes from the target.
In the early 20th century, people were already attempting to use radio reflections to detect metallic targets. Early devices primarily proved one thing: when there's a large metallic object in the distance, the receiving end can see echo changes. This wasn't yet a complete radar system in today's sense and typically couldn't reliably provide range, velocity, and direction like modern radar, but it opened the problem: targets don't need to emit light or actively transmit signals; as long as they can reflect electromagnetic waves, they can potentially be detected.
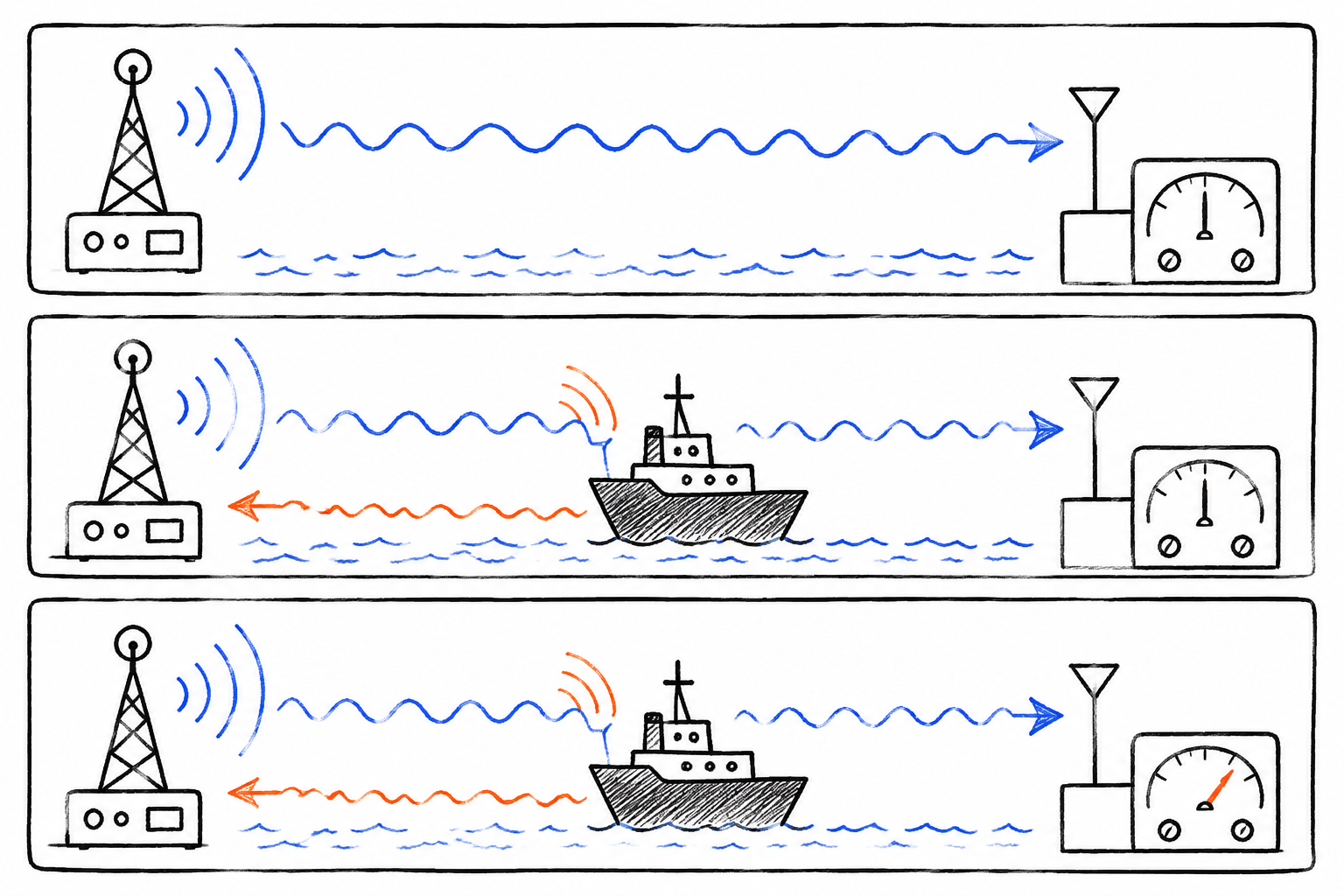
Figure 1.5 depicts the early radio echo experiment in three steps: first emit radio waves, the target reflects part of the energy, and changes appear at the receiving end. This stage doesn't pursue complete measurement, only confirms one thing: can the target be seen by the echo.
By the 1930s, aircraft were getting faster, and relying solely on visual observation, sound detection, and ground observation wasn't sufficient. Radar's value also became clear: it could detect distant targets early and connect "target detection" with "range estimation." The terms Detection and Ranging in the RADAR acronym preserve this early mission: first detect, then measure range.
Radar System Development
Wartime radar quickly evolved from individual experimental devices into systems engineering. Transmitters, receivers, antennas, displays, operators, and command systems had to work together to turn a weak echo into usable intelligence.
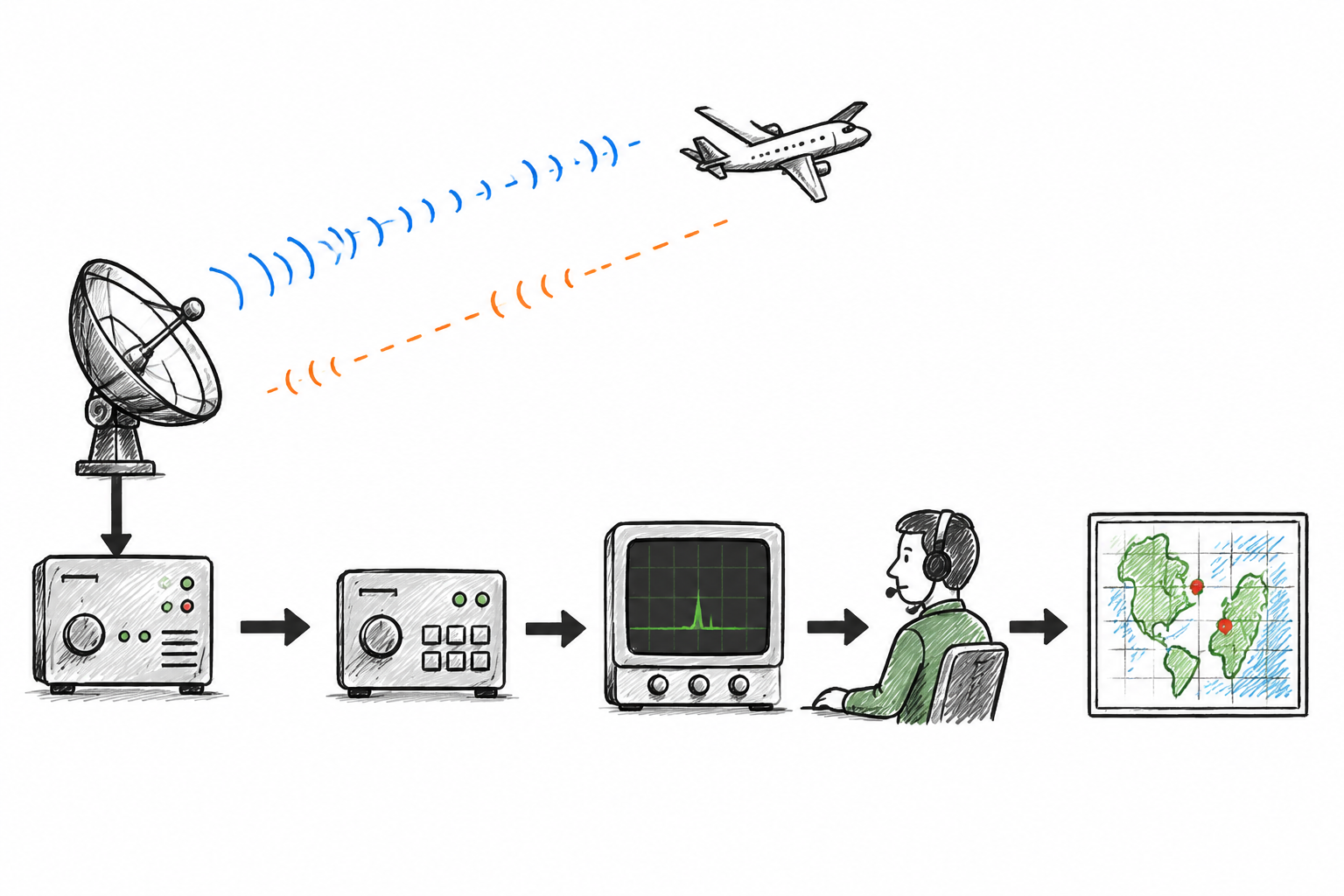
Figure 1.6 shows radar after systematization: antennas, transmitters, receivers, displays, operators, and command maps work together; weak echoes become usable information.
After the war, radar moved beyond air defense early warning into more scenarios. Airports use it to maintain air traffic order, ships use it for navigation at night and in fog, weather systems use it to observe precipitation and storms, traffic speed radar uses it to determine vehicle speeds, and automotive millimeter-wave radar uses it to sense vehicles ahead and obstacles. Scenarios changed, but the basic action remains similar: transmit electromagnetic waves, receive echoes, extract information from echoes.
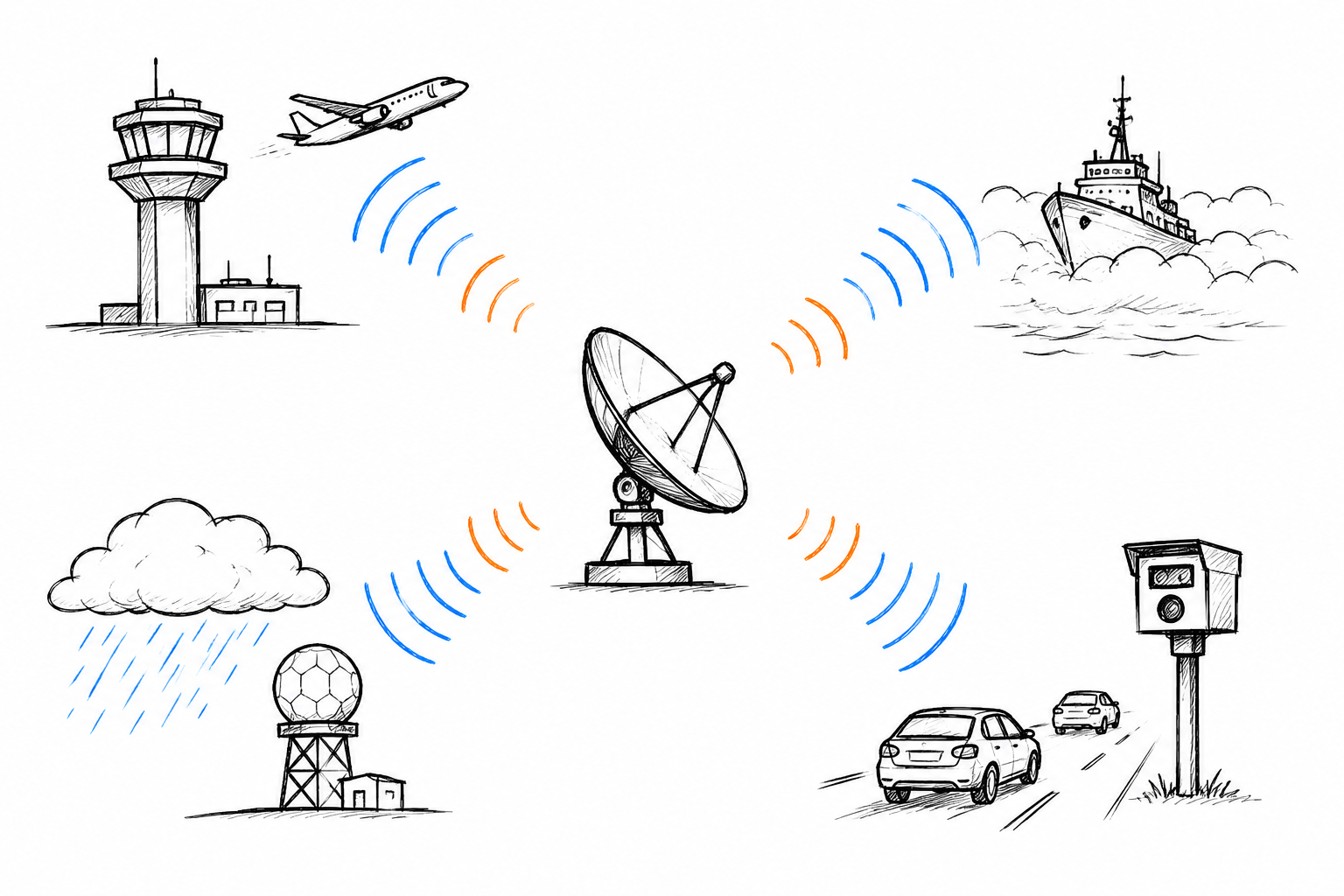
Figure 1.7 groups several application types together. Air traffic control, maritime, weather, and traffic scenarios differ, but all unfold around the same basic action: transmit electromagnetic waves, receive echoes, and organize them into usable information.
Radar development has also made echoes increasingly complex. With increased bandwidth and shorter wavelengths, radar can resolve finer structures. After antenna and array technology development, direction information becomes richer. With improved digital circuits and computing power, more processing can be done in data. What modern radar needs to do has also expanded from "seeing an echo" to organizing large amounts of echoes into images, tracks, detection results, and control decisions.
The Necessity of Signal Processing
Ideally, measuring echo delay and frequency would yield range and velocity. The actual situation isn't this clean.
What the receiver typically gets is a raw electrical signal, not a result already labeled "target at 6 km, velocity 30 m/s." When the target is far, echo energy is very weak. When there are multiple targets in the scene, echoes from different targets overlap. The ground, sea surface, buildings, raindrops, etc. also reflect electromagnetic waves. They aren't necessarily targets we want to report, but they appear in the received data. Looking at the raw waveform alone, you often only see a string of fluctuations; it's hard to point out which segment corresponds to which target.
Therefore, radar systems can't stop at "receiving echoes." They must also organize raw echoes step by step into interpretable results: first separate different delays along the time direction to separate targets at different ranges; then analyze frequency or phase changes along the pulse sequence to separate targets at different velocities; finally, combined with threshold decisions, pick out truly reportable target responses from noise and clutter. When direction information is needed, antenna pointing and beam response must be further utilized.
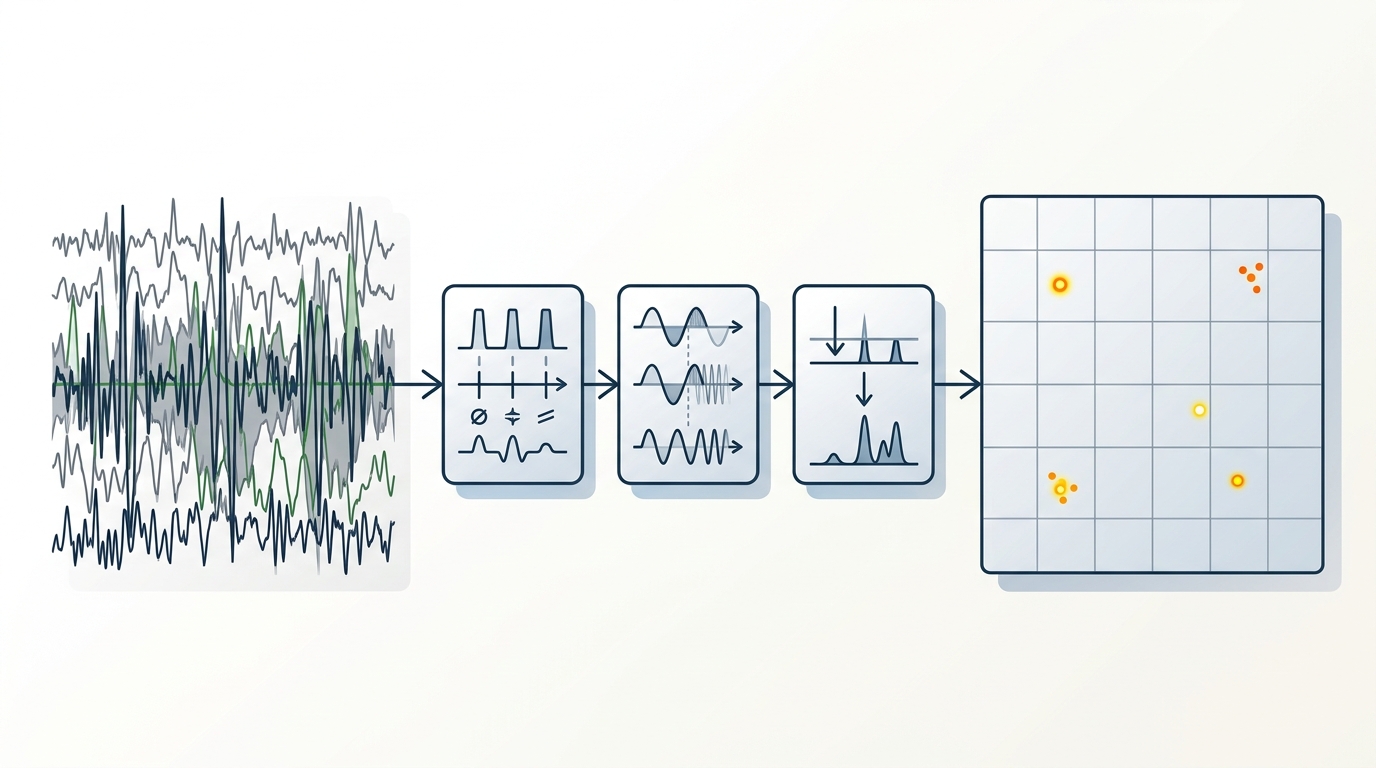
Figure 1.8 shows this transformation. The raw echoes on the left mix targets, clutter, and noise; after range processing, velocity processing, and detection in the middle, they become interpretable plots and target results on the right. What signal processing does is organize "received electrical signals" into "interpretable target information."
Several types of information in echoes need to be extracted one by one from raw data. The following table matches these clues with subsequent chapters.
| Clues in Echoes | Questions Answered | Location in This Book |
|---|---|---|
| Echo arrival time | How far is the target | Chapter 4: Range Measurement |
| Echo frequency or phase changes | Is the target approaching or receding | Chapter 5: Velocity Measurement |
| Echo strength and background differences | Can this response be considered a target | Chapter 6: Target Detection |
| Antenna direction or beam response | What direction is the target from | Chapter 7: Angle Measurement |
Processing Chain
Later in this book, concepts like time domain, frequency domain, sampling, matched filtering, Doppler, CFAR, and range-velocity maps will appear. They all serve the same chain: start with echoes, then extract range and velocity from echoes, determine which responses count as targets, and add direction information when needed.
Chapter 2 introduces signal fundamentals, because echoes are first and foremost signals. Chapter 3 explains what radar transmits and receives, and how received data is organized. Chapter 4 performs range measurement on echo delays. Chapter 5 performs velocity measurement from changes in a pulse train. Chapter 6 discusses detection. Chapter 7 adds direction. Chapter 8 connects these steps into a complete MATLAB processing flow.
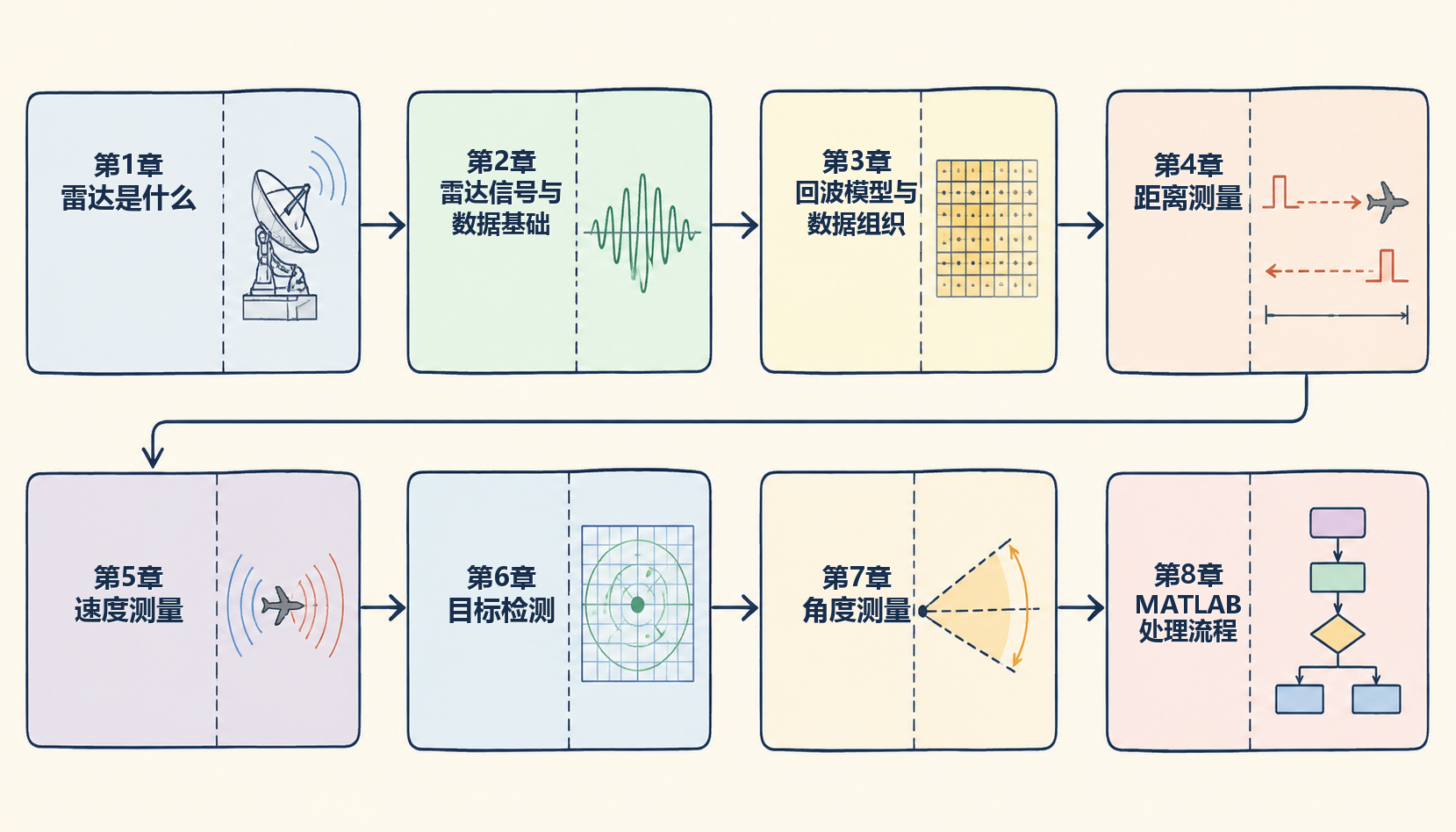
Figure 1.9 is a roadmap organized by chapters. The first few chapters clarify signals and radar echoes, the middle chapters process range, velocity, detection, and angle respectively, and finally everything converges into a complete program. The main text focuses on pulsed radar: transmit one or a train of pulses, receive echoes, and organize target information from the echoes.